
Quality assessment of Android smartphone with GNSS raw observations
-
摘要: 随着全球卫星导航系统(GNSS)的不断建设,智能手机基于移动位置服务 (LBS)得到了迅猛发展. 文中选取市面上常见的3种手机机型,包括:三星S9+(Exynos)、华为Mate30和华为P40 Pro作为研究对象,并使用北斗星通UR4B0-D高性能GNSS接收机进行同步静态观测实验,从卫星可见数、载噪比(CNR)、卫星高度角和多路径误差等方面,对手机GNSS数据质量进行分析. 结果表明:不同型号手机在观测能力和数据质量方面存在明显差异. Android智能手机的GNSS数据质量较差,CNR较小,且CNR与卫星高度角无明显关系. 此外,多路径误差是影响Android智能手机高精度定位的主要误差项之一.
-
关键词:
- Android智能手机 /
- GNSS原始观测值 /
- 数据质量评估 /
- 多路径误差 /
- 静态数据分析
Abstract: With the continuous construction of Global Navigation Satellite System (GNSS), the location-based service (LBS) of smart phones has rapidly developed. In this paper, several commonly used smartphone are selected as research objects, such as Samsung S9+(Exynos), Huawei Mate30, Huawei P40 Pro. the measurement receiver UR4B0-D from BDStar Navigation is used for synchronous static observation experiment. the GNSS raw data quality of Android smartphone is analyzed from the aspects of satellite visibility, carrier-to-noise ratio (CNR), satellite altitude angle, multipath error and so on. The results show that there are obvious differences in observation capabilities and data quality among different smartphones. Android smartphones have poor data quality and low CNR. The CNR of Android smartphones has no obvious relationships with the satellite altitude angle. In addition, multipath error is one of the main errors that affect the high-precision positioning of Android smartphones. -
0. 引 言
当今时代,手机等智能设备由于具有成本低、便携性好的特点,该设备已经成为人类生活和工作中不可或缺的工具. 目前,智能手机基本都搭载了全球卫星导航系统(GNSS)模块,极大地方便了人们的日常生活. 各大卫星导航系统逐步发展,可见卫星数进一步增加,也为基于移动位置服务(LBS)的快速发展提供了保证[1]. 未来公众对LBS服务的需求将会越来越大,对定位精度、稳定性要求也会越来越高. 因此,手机等智能设备的高精度定位受到学者的广泛关注,成为当前导航定位领域的一个研究热点.
在早期的Android系统版本中,GNSS模块只开放了获取GNSS芯片输出的位置、速度等信息的应用程序编程接口(API),开发者和用户很难得到原始的GNSS观测数据,因此难以开展进一步的研究. 2016年5月谷歌公司宣布,从Android N版本操作系统开始,开发者和用户可以通过API来得到GNSS的伪距、载波相位、多普勒等原始观测数据,从而具备进行精确计算的条件,这对于研究智能设备的精确定位有着重要的意义. 与测量型等专用GNSS接收机不同,手机、平板电脑等这些大众智能设备,往往采用体积小、成本低的线性极化天线[2]和低成本、低功耗的导航芯片,这必将影响智能设备的GNSS原始观测数据质量,而原始观测数据质量好坏是影响定位精度的主要因素.
国内外许多学者对智能设备的GNSS数据质量和定位精度进行了研究和分析. 早在谷歌还未开放获取GNSS原始数据的API时,就已经有学者对此产生了强烈的兴趣. Kirkko-Jaakkola等[3]和Humphreys T E等[4]使用定制的智能手机诺基亚Lumia 1520和三星Galaxy S5获得了GNSS原始观测数据,他们发现智能手机的GNSS数据噪声和异常值均明显高于低成本接收机. Håkansson M [5]通过Nexus 9平板电脑评估了多路径效应对精确定位的影响. Paziewski J等[6]使用华为P20和Javad Alpha+GrAnt_G3T天线评估了智能手机的GNSS数据质量. Riley等[7]指出手机由于电池容量限制存在占空比(duty cycle)机制,这种机制降低了功耗但会导致载波相位观测数据不连续. LIU等[8]、陈波等[9]指出手机GNSS数据存在载波相位与伪距不一致的问题,并且通过平滑伪距的方式进行了单点定位及差分定位的测试. 薄亚东等[10]对华为Mate30和华为honor V20的GNSS原始观测数据质量和定位结果进行分析,指出智能手机会发生频繁的失锁现象且多路径误差明显,差分定位存在无法固定模糊度的问题. 总体来说,目前针对智能手机GNSS定位的研究相对较少,且大部分并未将单双频手机进行对比分析.
本文同时使用单频、双频智能手机采集GNSS原始观测数据,并将其与北斗星通UR4B0-D高性能GNSS接收机的数据作对比,从卫星可见性、载噪比(CNR)、高度角、多路径效应等方面进行分析,评估智能手机GNSS的原始观测数据质量,为后续手机高精度定位应用提供参考.
1. 智能手机GNSS原始观测值获取与分析方法
1.1 智能手机GNSS原始观测值获取
自Android 7.0(即N版本)开始,Android API等级升级至24,开发者可以通过GNSSClock和GNSSMearement两类中的字段直接或者间接的获取伪距观测值、载波相位观测值、多普勒观测值和CNR等. 相关字段如表1所示[11].
表 1 Android API时钟和测量类字段信息字段名 所属类 描述 TimeNanos GNSSClock 手机硬件时间/ns BiasNanos GNSSClock 手机本地时钟与GPST亚纳秒级钟差/ns FullBiasNanos GNSSClock 手机本地时钟与GPST纳秒级钟差/ns DriftNanosPerSecond GNSSClock 钟漂/(ns·s−1) TimeOffsetNanos GNSSMeasurement 手机TimeNanos的偏差修正量/ns ConstellationType GNSSMeasurement 星座类型 Svid GNSSMeasurement 卫星编号 ReceivedSvTimeNanos GNSSMeasurement GNSS信号在卫星端的发射时间/ns AccumulatedDelataRange GNSSMeasurement 载波相位观测值/m Cn0DbHz GNSSMeasurement CNR/(dB·Hz) PseudorangeRatemeterperSecond GNSSMeasurement 伪距变化率 CarrierFrequencyHz GNSSMeasurement 载波频率 GPS时间、伪距观测值、多普勒观测值并不能直接通过Android API获取到,需要通过计算间接得到. 其中GPS时(GPST)可由下式计算得到:
$$ \begin{split} {\rm{GPST}} =& T{{ime}}N{{anos}} - \\ &\left( {F{{ull}}B{{ias}}N{{anos}} + B{{ias}}N{{anos}}} \right)\\ \end{split}. $$ (1) 伪距观测值ρ的计算公式如下:
$$ \rho = \frac{{{t_{{R}}} - {t^{{S}}}}}{{{{10}^9}}} \times c. $$ (2) 其中,
$$ \begin{split} {{{t}}_R} =& TimeNanos - (FullBiasNanos+ \\ & BiasNanos)+TimeO\!\!f\!\!f\!\!setNanos \end{split}, $$ (3) $$ {t}^{{S}}=ReceivedSvTimeNanos. $$ (4) 式中,c为光速.
其中TimeNanos和TimeOffsetNanos取当前历元值,而FullBiasNanos和BiasNanos取第一个历元从API获取到的值. 这是因为由于手机钟差不稳定,会导致接收机硬件时钟与GPST的差值会随时间变化,以第一个历元的偏差值作为偏差估计值可以保证接收数据的时间间隔一致,避免给后续处理带来麻烦.
多普勒的计算公式如下:
$$ \!\!\!\!\!\!\!\!\!\!\!\!\!\!\begin{split} Doppler = - PseudorangeRatemeterperSecond \times \frac{f}{c} \end{split}. $$ (5) 式中,
$f$ 为载波频率.载波相位观测值及CNR可以分别通过AccumulatedDelataRange和Cn0DbHz字段得到.
由上可知,Andriod N版本开始应用程序可以通过相关API获取分析所需的GNSS原始数据. 许多公司利用这些应用程序接口,开发了可以输出GNSS原始观测数据的应用程序(APP),如谷歌公司的发布的GNSSLogger,Geo++公司发布的Geo++RINEX Logger等. 但由于GNSSLogger无法直接以RINEX格式输出原始数据,不便于后续分析研究,而Geo++RINEX Logger可以以RINEX标准格式输出原始数据,因此选择使用Geo++RINEX Logger采集原始数据.
1.2 多路径误差分析方法
在卫星信号传输过程中,信号会在接收机附近的地面、墙壁等物体表面发生反射现象,反射后的信号与卫星直接发射的信号同时被接收机接收,从而产生多路径误差. 降低多路径误差主要通过使用较好的GNSS天线和选择较为开阔的测量环境两个方面进行. 但Android智能手机受到体积限制,只能使用体积很小的线性极化贴片天线,这使得Android智能手机受到多路径效应的影响较为严重. 同时,Android智能手机的使用环境常常位于高楼林立的城市峡谷中,这使得多路径误差进一步增大,成为了手机定位的主要误差项之一.
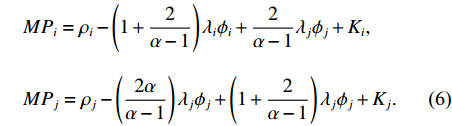
利用伪距和载波相位观测值的线性组合,再消去双频信号计算得到的电离层延迟,可以得到L1和L5频点的多路径效应,计算公式如式(6)所示:
$$\!\!\!\!\!\!\!\!\! \begin{split} &M{P_i} = {\rho _i} - \left( {1 + \displaystyle\frac{2}{{\alpha - 1}}} \right){\lambda _i}{\phi _i} + \displaystyle\frac{2}{{\alpha - 1}}{\lambda _j}{\phi _j} + {K_i},\\ &M{P_j} = {\rho _j} - \left( {\displaystyle\frac{{2\alpha }}{{\alpha - 1}}} \right){\lambda _j}{\phi _j} + \left( {1 + \displaystyle\frac{2}{{\alpha - 1}}} \right){\lambda _j}{\phi _j} + {K_j} \end{split}. $$ (6) 式中:
$M{P_i}$ 和$M{P_j}$ 分别为频点$i$ 、频点$j$ 对应的伪距多路径误差值;${\;\rho _i}$ 、${\;\rho _j}$ 为频点$i$ 、频点$j$ 对应的伪距观测值;${\lambda _i}$ 、${\lambda _j}$ 为频点$i$ 、频点$j$ 对应的波长;${\phi _i}$ 、${\phi _j}$ 为频点$i$ 、频点$j$ 对应的载波相位观测值;$\alpha = \displaystyle\frac{f_i^2}{f_j^2}$ ,其中${f_i}$ 和${f_j}$ 为频点$i$ 、频点$j$ 对应的载波频率;${K_i}$ 和${K_j}$ 为未知的整周和测量噪声的函数. 可以通过将多个历元取平均,然后将包含模糊度参数的序列减去这一均值得出两个伪距的多路径误差值.2. 实验简介
本文使用三星S9+(Exynos) (下文简称三星S9+)、华为Mate30、华为P40 Pro进行静态观测实验,并且与测量型接收机北斗星通UR4B0-D的同步观测数据做对比,3款智能手机的具体参数如表2所示. 实验地点为中国科学院国家授时中心临潼园区的综合楼楼顶,视野开阔无遮挡物,观测条件良好,采样率为1 s,采样时长为3 h. 实验环境如图1所示.
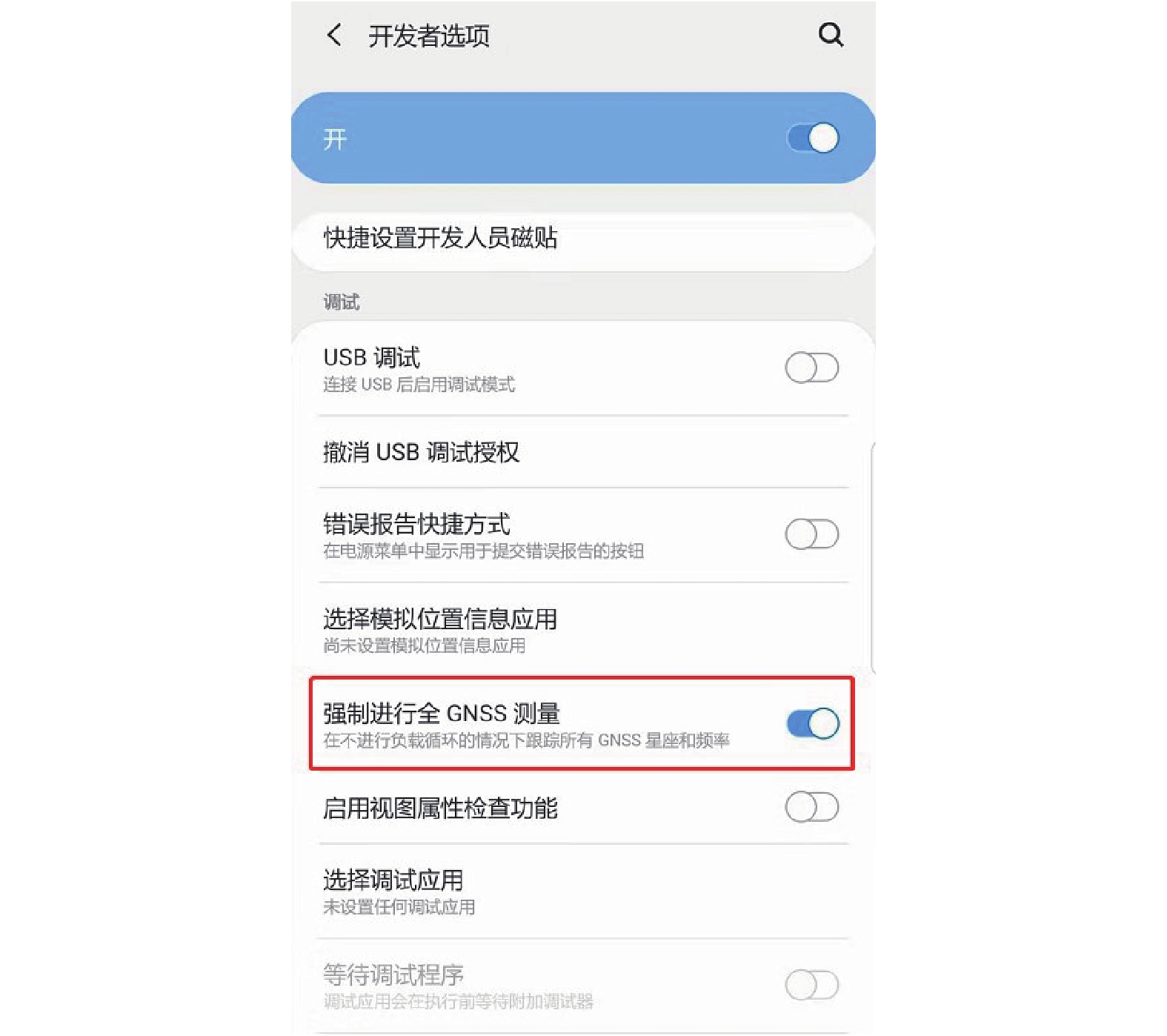
表 2 三款智能手机具体参数手机型号 芯片型号 可接收卫星频点 三星S9+(Exynos) Broadcom BCM4775 GPS L1、Galileo E1、QZSS L1、GLONASS G1、BDS B1 华为P40 Pro Hisilicon Hi1105 GPS L1+L5、Galileo E1+E5a、QZSS L1+L5、GLONASS G1、BDS B1 华为Mate30 Hisilicon Hi1103 GPS L1+L5、Galileo E1+E5a、QZSS L1+L5、GLONASS G1、BDS B1 部分Android智能手机为了减少电量消耗以达到更长的续航时间,往往采用占空比技术. 在占空比技术下,一个脉冲循环内只有一部分时间可以通电,因此会导致载波相位观测值不连续[7]. 而部分手机可以在开发者选项中手动选择“强制进行全GNSS测量”以关闭占空比技术,如图2所示. 本文选用的三星S9+采用该方法关闭占空比技术,而华为P40 Pro和华为Mate30默认关闭占空比技术.
3. 实验结果分析
3.1 可见卫星数分析
对手机原始观测数据进行分析后发现,3台Android手机均可以接收北斗二号(BDS-2)和北斗三号(BDS-3)卫星数据,但2台双频手机接收到的有双频数据的卫星数量都很有限. 华为Mate30可以接收到7颗同时具有L1+L5信号的GPS卫星,3颗同时具有L1+L5的准天顶卫星系统(QZSS)卫星,在不同时段最多可以同时接收到7颗具有E1+E5a信号的Galileo卫星;华为P40 Pro可以接收到4颗同时具有L1+L5信号的GPS卫星,3颗同时具有L1+L5的QZSS卫星,8颗同时具有E1+E5a信号的Galileo卫星. 但部分卫星的双频信号并不稳定,存在大量的数据缺口,导致实际可用的卫星数目远远小于观测到的可见卫星数.
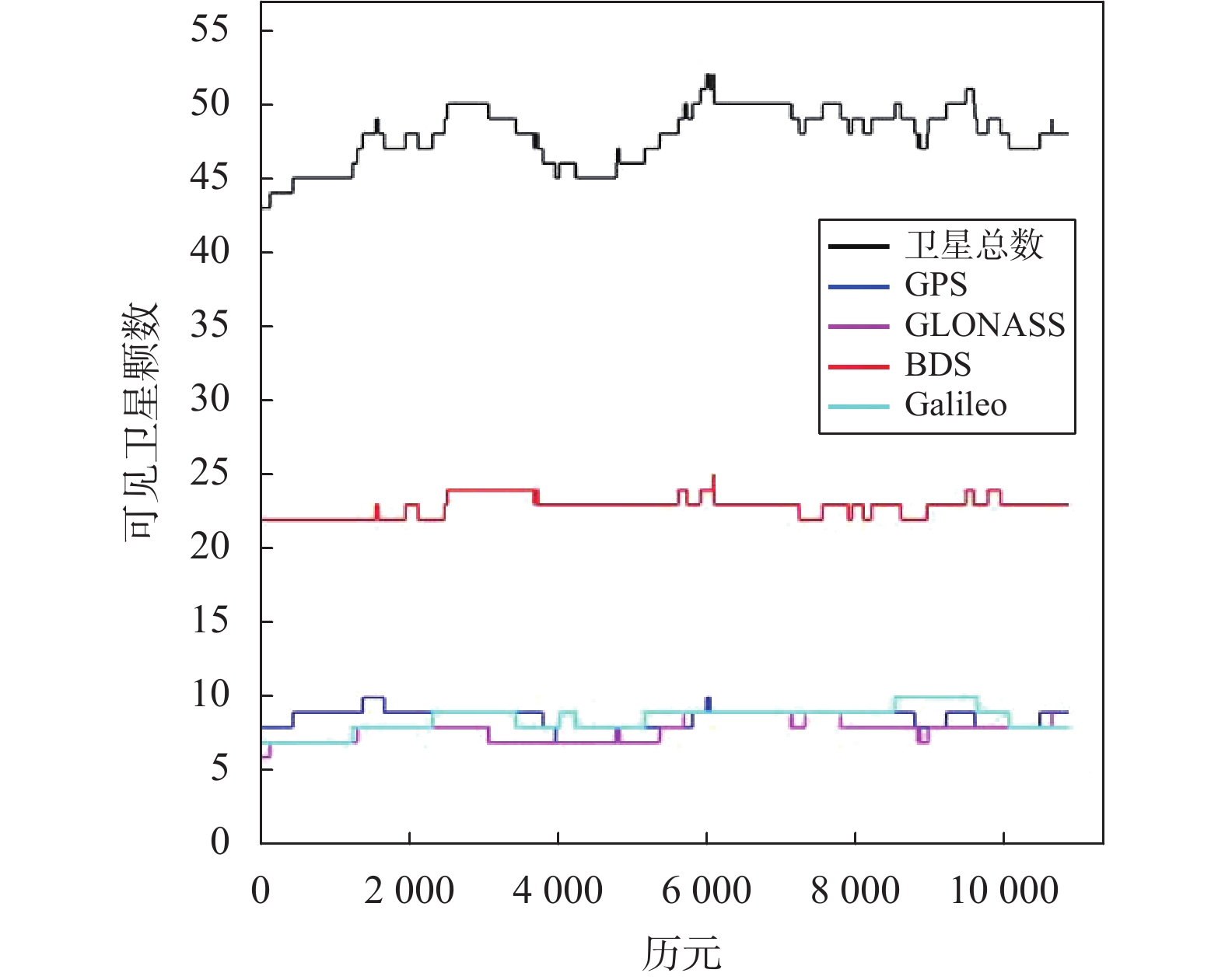
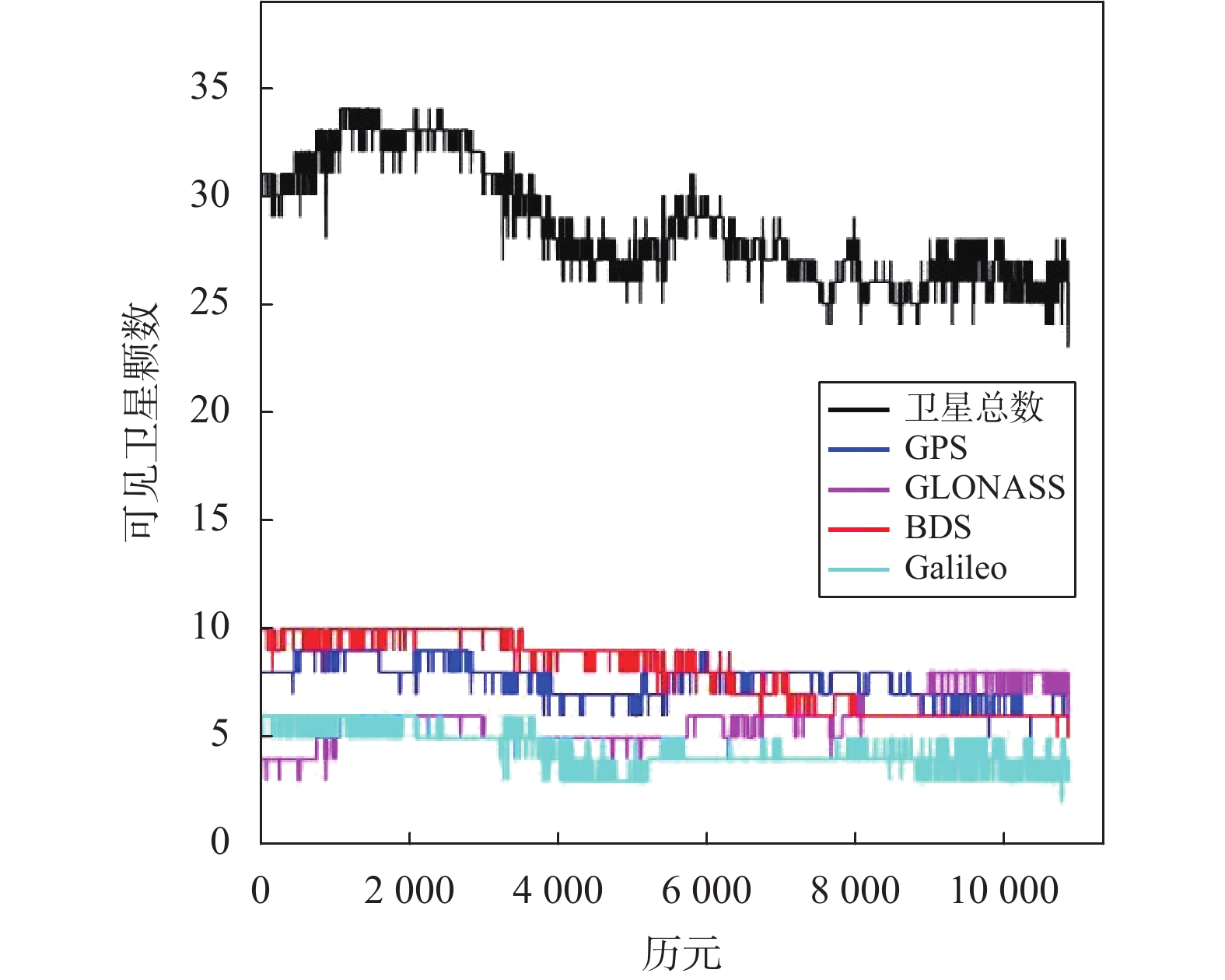
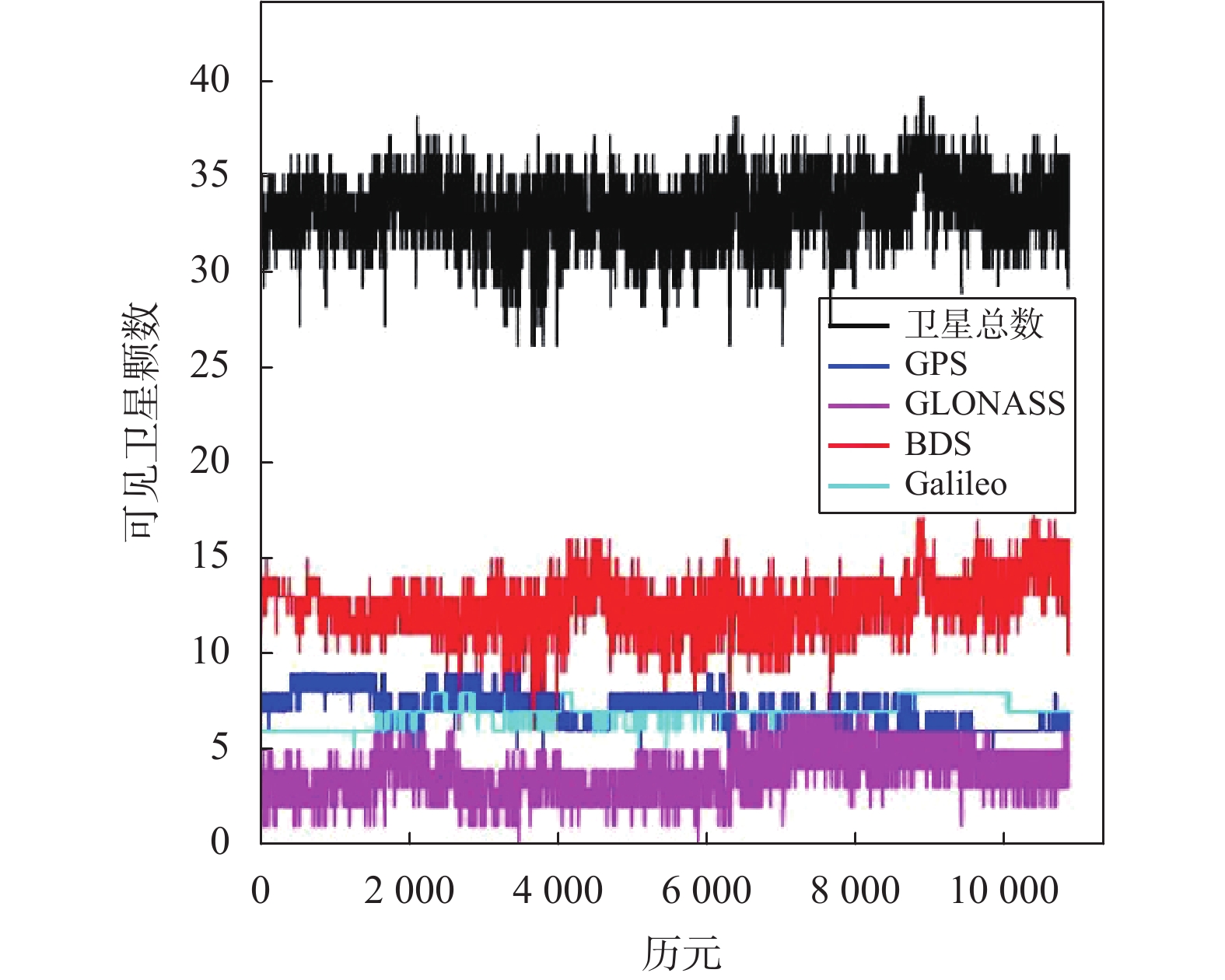
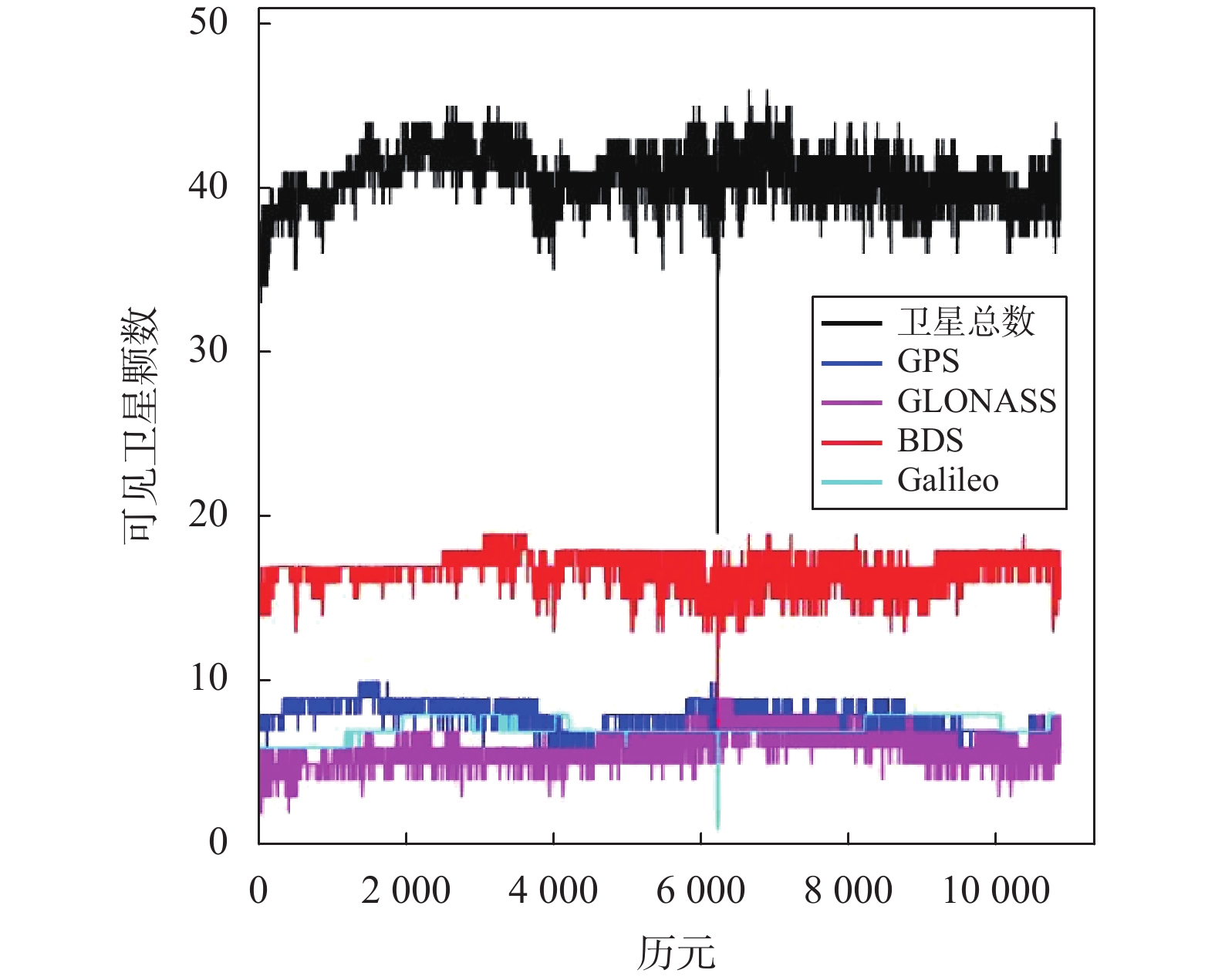
在3 h的观测时间内,剔除掉未接收到数据的卫星后,3台智能手机和北斗星通UR4B0-D接收机各历元观测卫星数如图3~6所示. 可以非常明显的发现,接收机的可见卫星数非常稳定且观测到的卫星数目是最多的,约为45~50颗. 3台智能手机中,三星S9+的可见卫星数是3台手机中最少的,约为25~34颗,但相较于另外2部手机卫星数的波动较小,稳定性更好. 华为P40 Pro的可见卫星数约为32~38颗,但卫星数的波动是3台手机中最大的. 华为Mate30接收到的卫星数目约为35~44颗,可见卫星数的波动较大,但在第6 224历元附近出现了数据采集中断,导致图形出现不正常的跳变. 华为P40 Pro和华为Mate30的可见卫星数都有较大的波动,这种波动主要是由于GLONASS和北斗卫星导航系统(BDS)的可见卫星数波动较大导致的,而GPS和Galileo系统的可见卫星数波动较小.
总体来说,相对于接收机而言手机观测能力和稳定性均表现较差,且不同机型之间由于采用不同的GNSS芯片和天线,观测能力也存在着较大的差异. 即使是同品牌的手机,这种差异也比较明显.
3.2 CNR分析
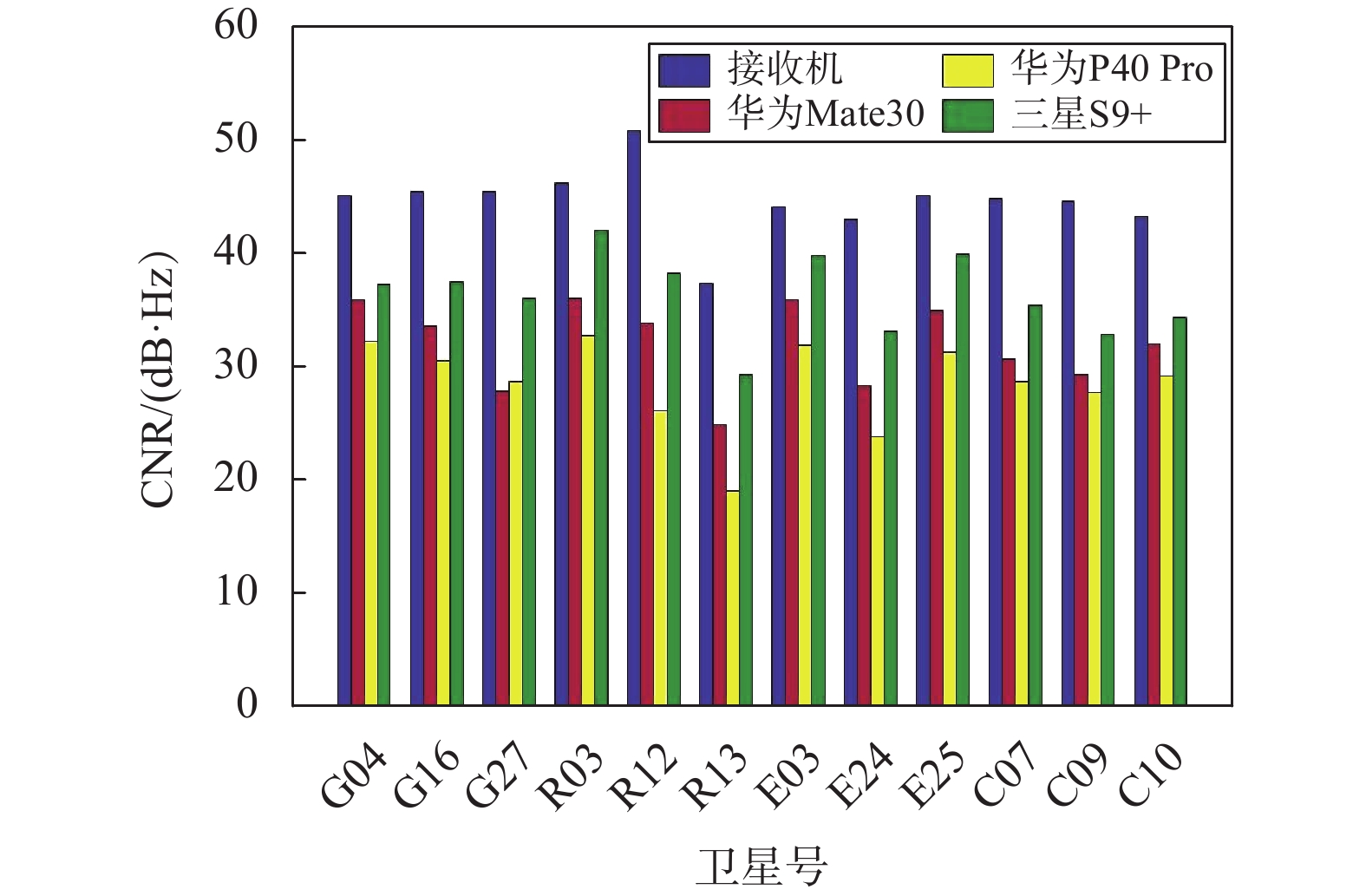
接收机输出的CNR反映了所跟踪GNSS卫星的观测值精度和接收机天线的噪声密度,是反映测量噪声水平的重要指标[11]. CNR大小和数据质量成正比. 从每个卫星系统中选取3颗卫星,计算接收机和3台手机所选卫星所有历元的平均CNR. 不同设备在L1频点的CNR对比如图7所示.
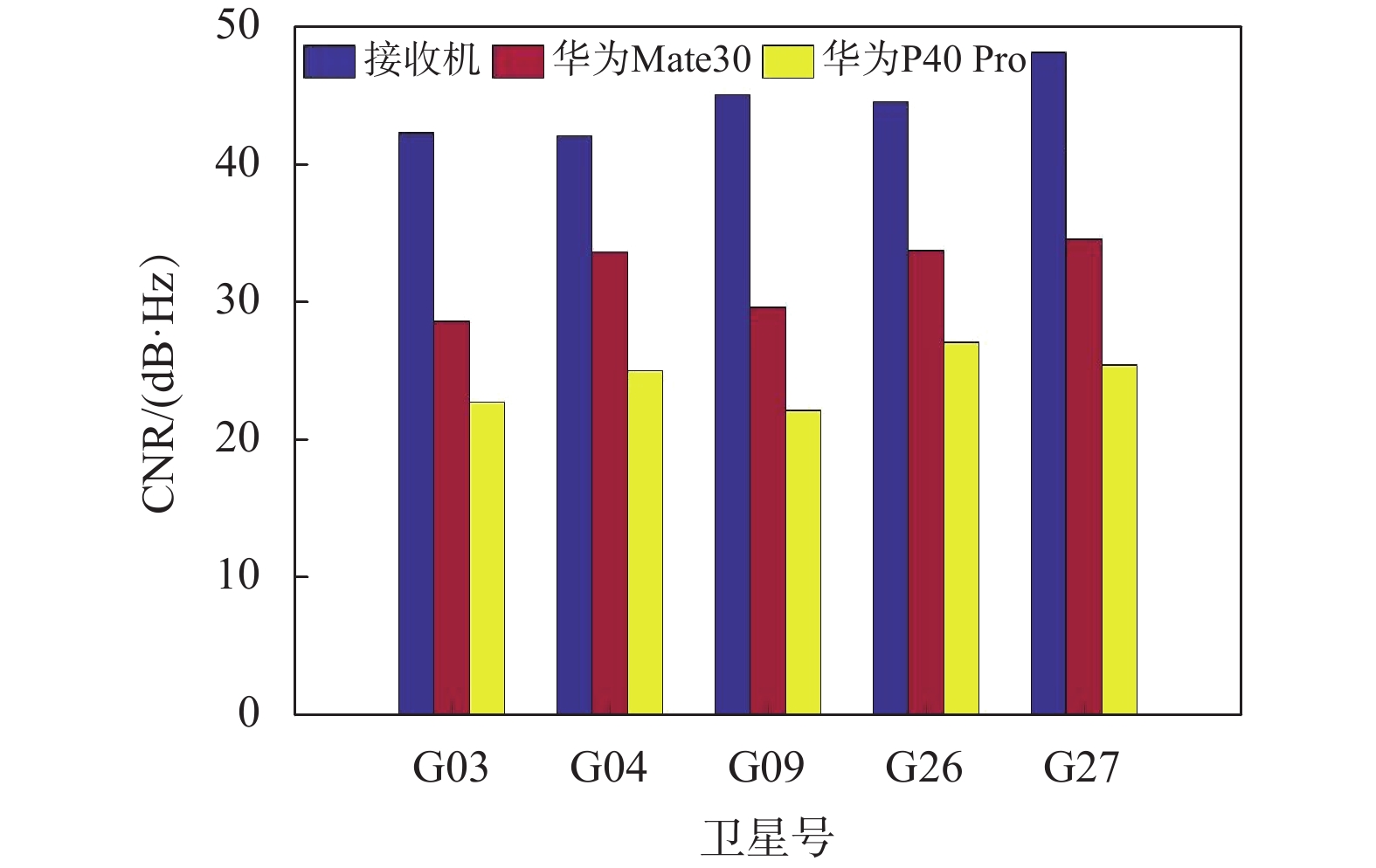
由于三星S9+无法接收双频信号,因此在L5频点只进行华为Mate30和华为P40 Pro与接收机的对比. 选取GPS的5颗卫星进行对比,如图8所示.
由图7、图8可知,Andriod智能手机的CNR明显低于测量型接收机,L1频点3台手机的CNR比测量型接收机低约10~15 dB·Hz. 3台手机中只能接受单频数据的三星S9+ CNR最大,大部分卫星平均CNR达到了35~40 dB·Hz. 而华为P40 Pro的CNR最小,平均CNR约在30 dB·Hz. 在L5频点上,接收机的CNR均在40 dB·Hz以上,而两台双频手机的CNR均较低,华为Mate30 CNR约为29~34 dB·Hz,而华为P40 Pro CNR仅有22~27 dB·Hz. 较低的CNR说明手机接收的数据中存在着大量的噪声.
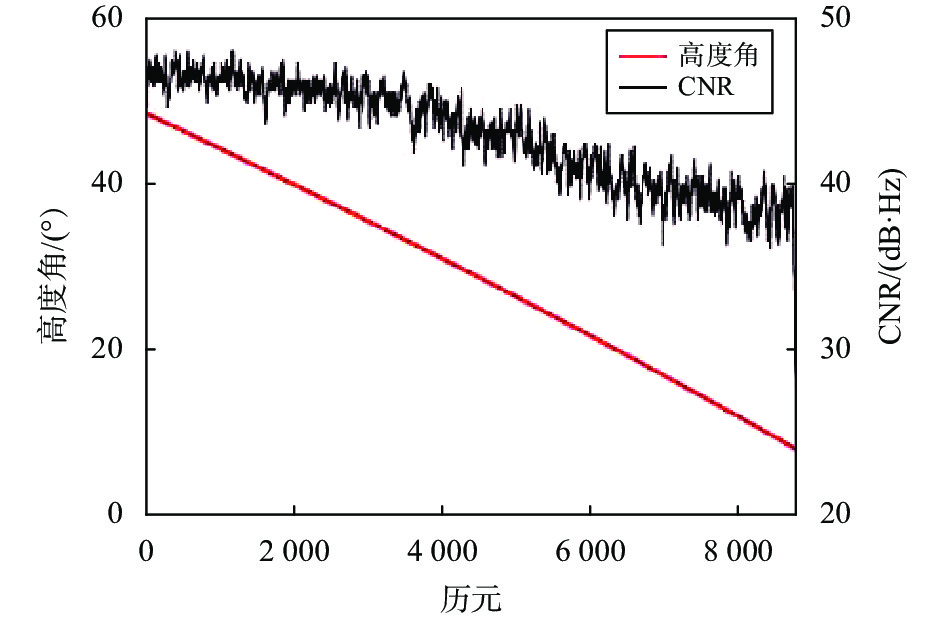
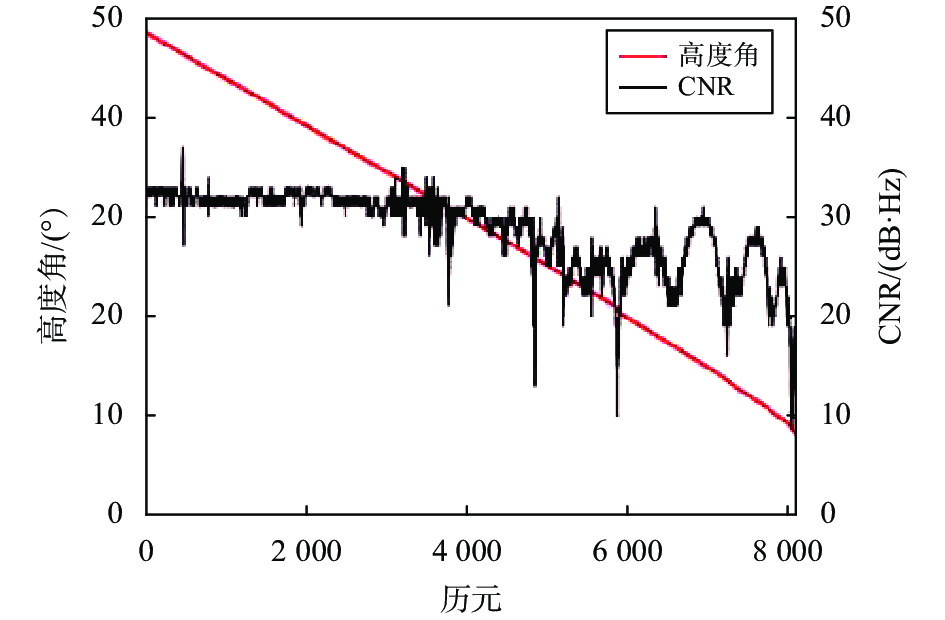
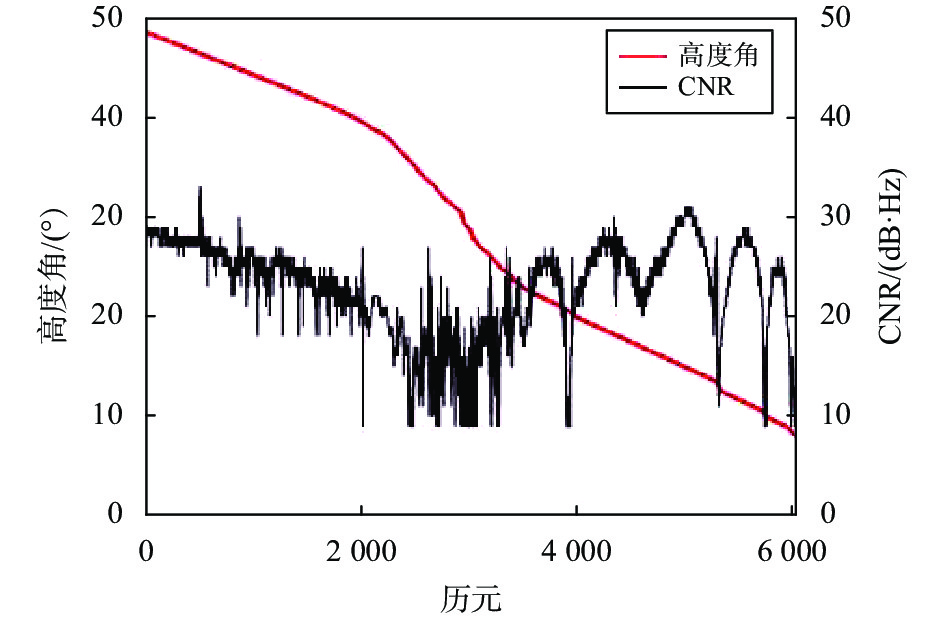
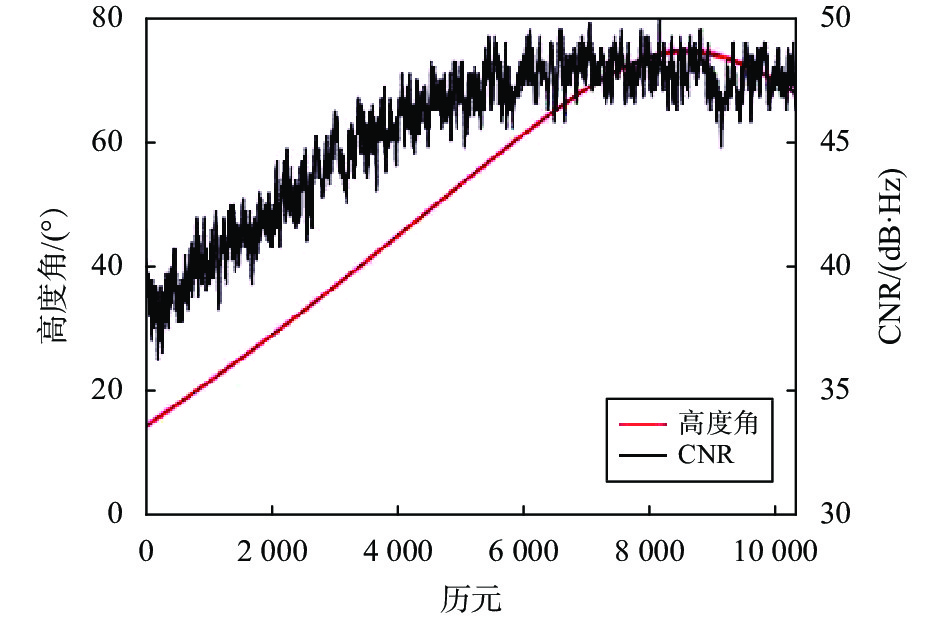
3.3 高度角分析
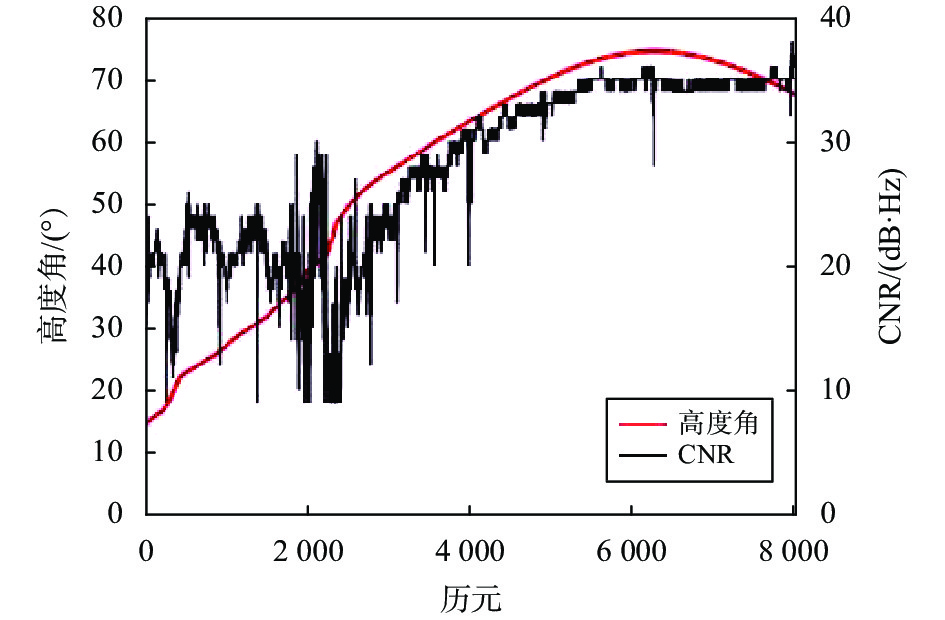
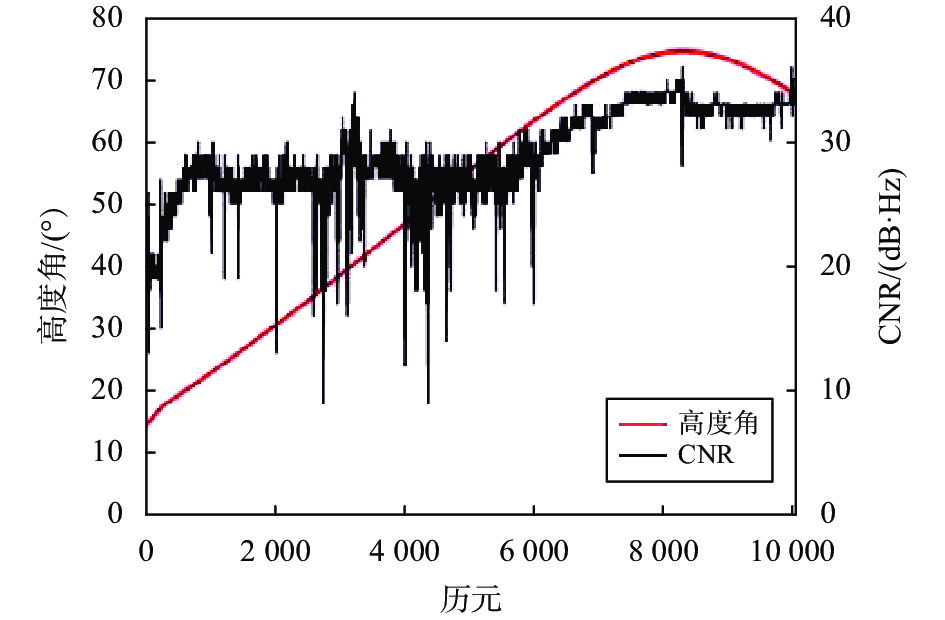
选取G31、G27两颗卫星分析其L1频点CNR和高度角的关系,图9~11分别为接收机、华为Mate30和华为P40 Pro对G31卫星CNR和高度角分析的结果,图12~14是三者对G27卫星CNR和高度角分析的结果. 华为P40 Pro仅在6 064历元中接收到G31卫星的数据. 红色线为高度角,可见对于G31卫星,在所有历元中高度角由大到小变化,接收机的CNR也随之减小约15 dB·Hz,但两部手机的CNR没有表现出逐渐减小的趋势,甚至高度角降低时反而有CNR增大的现象. 对G27卫星,高度角由小到大变化. 在高度角较小时,并未出现CNR随高度角减小而一直减小的现象. 可见手机的CNR与卫星高度角的相关性较小. 推测是因为手机接收到的数据中已经包含有大量噪声和多路径误差,高度角减小时噪声和多路径误差存在波动的情况,但并不会增大太多.
3.4 多路径误差分析
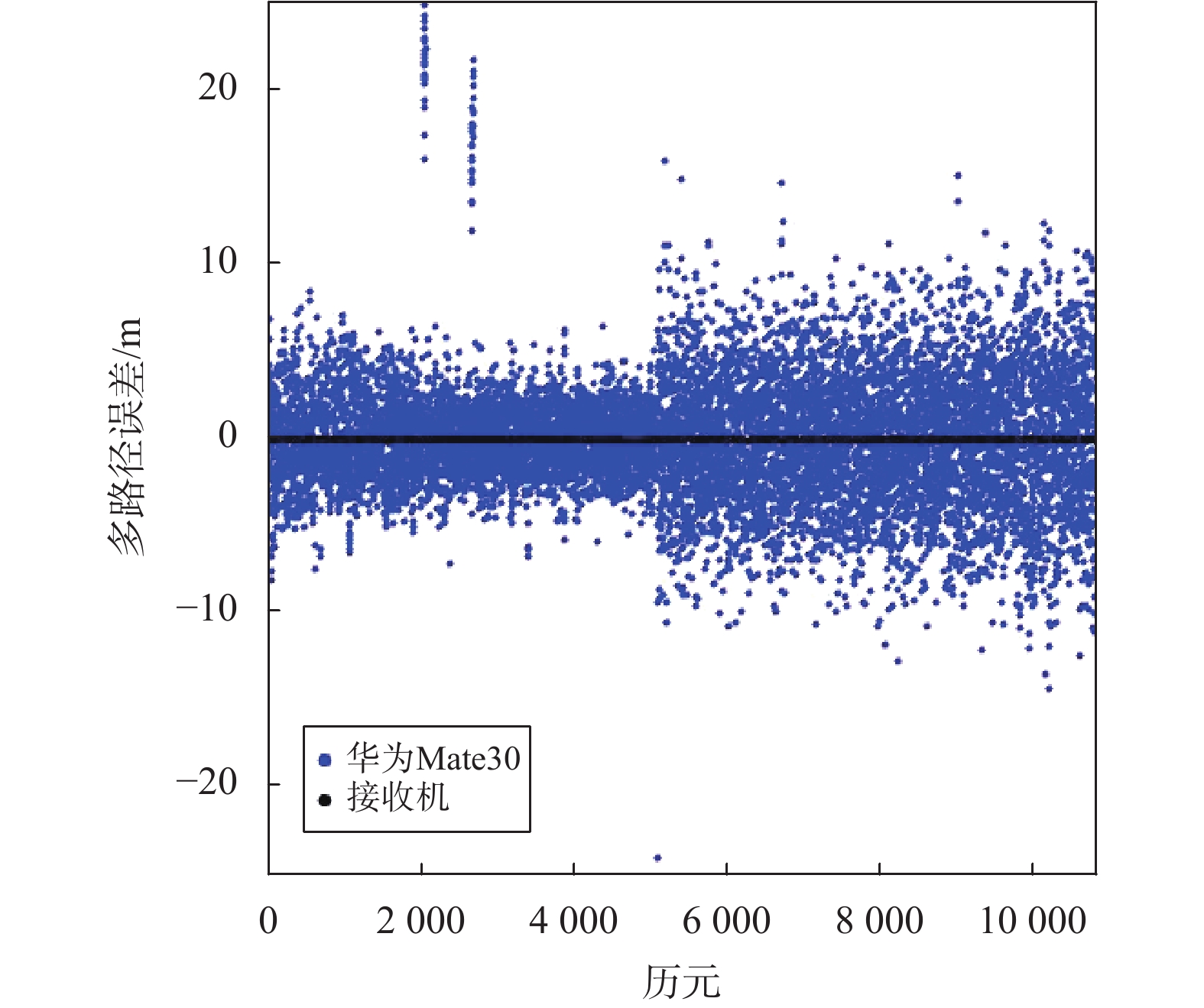
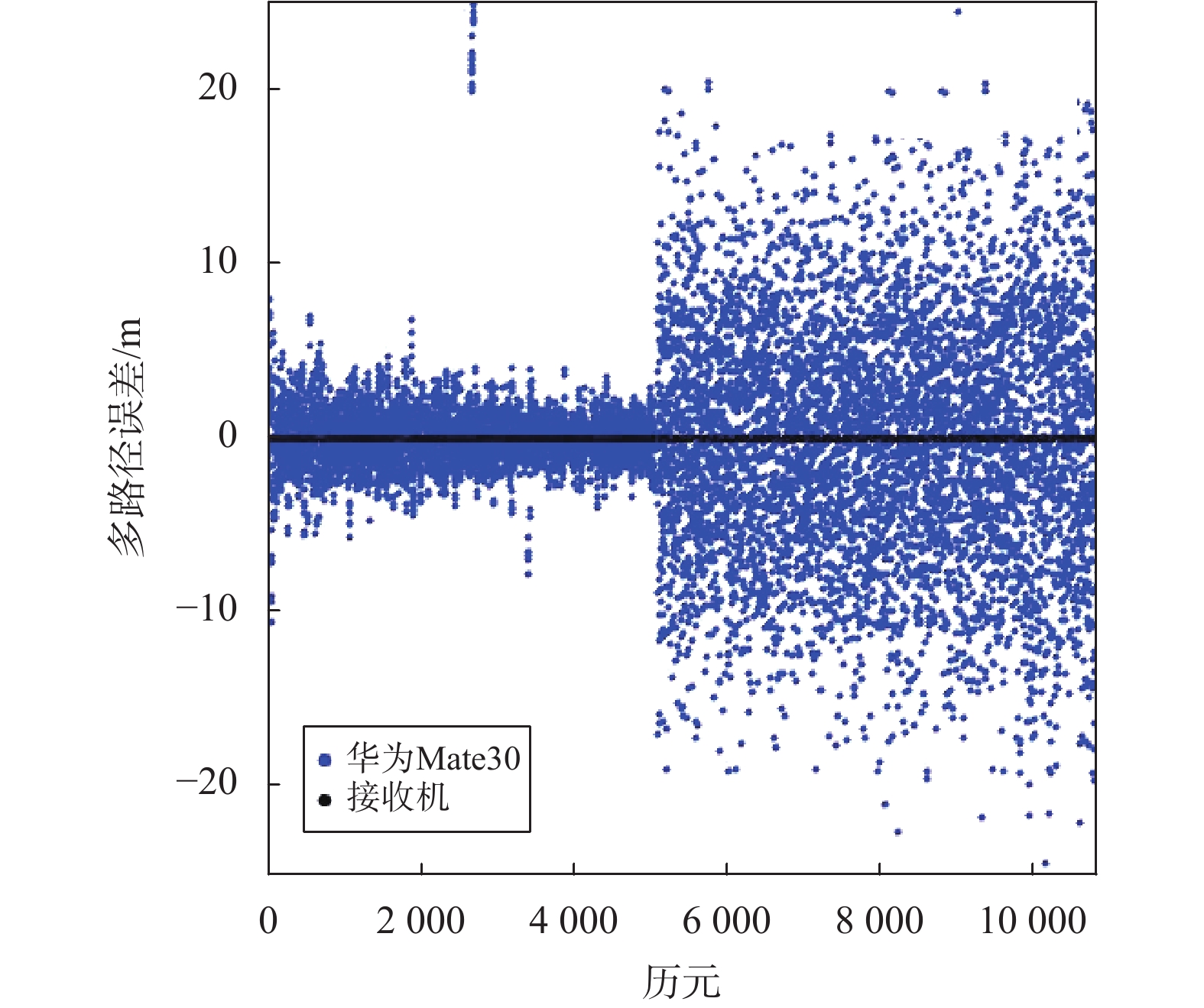
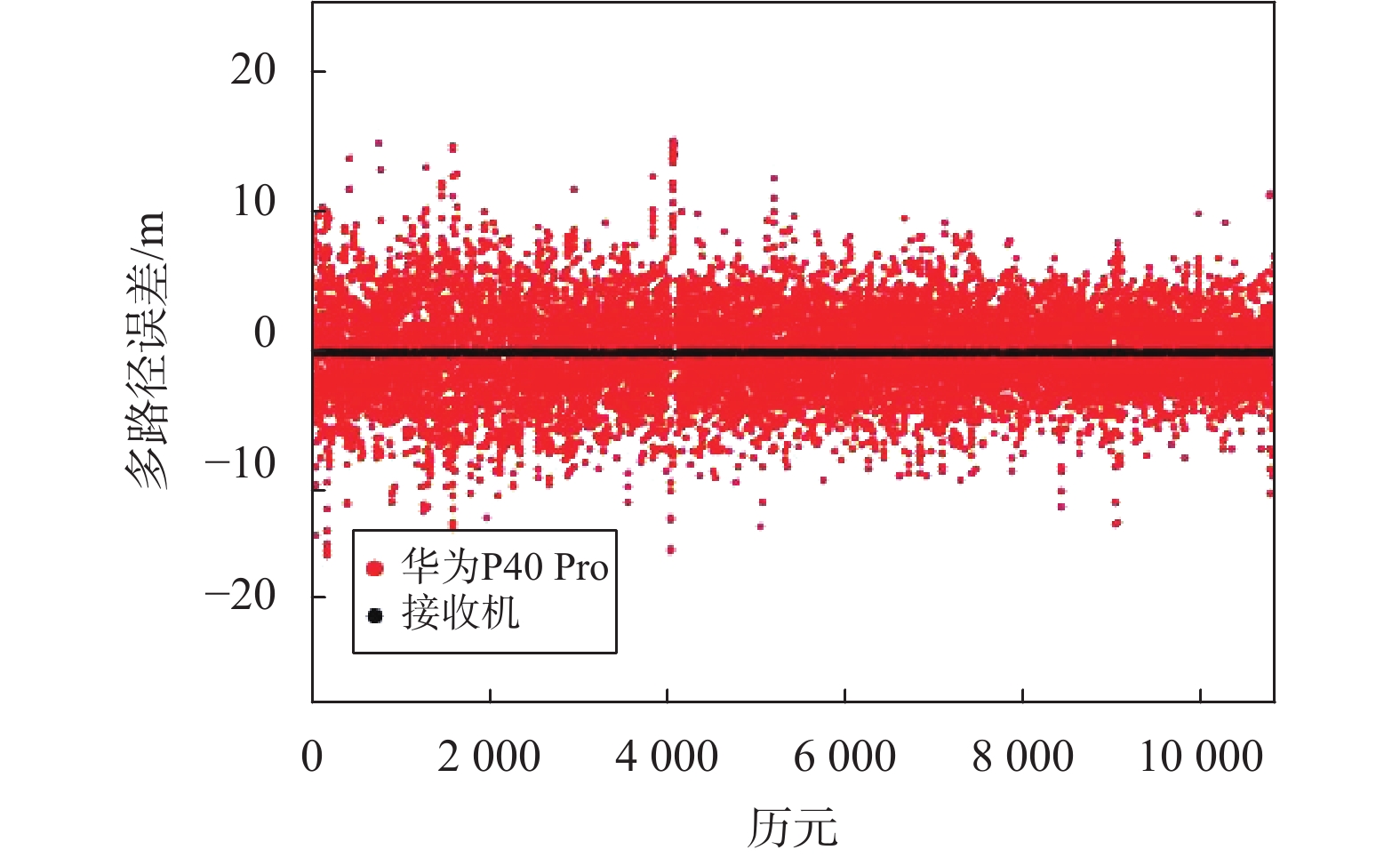
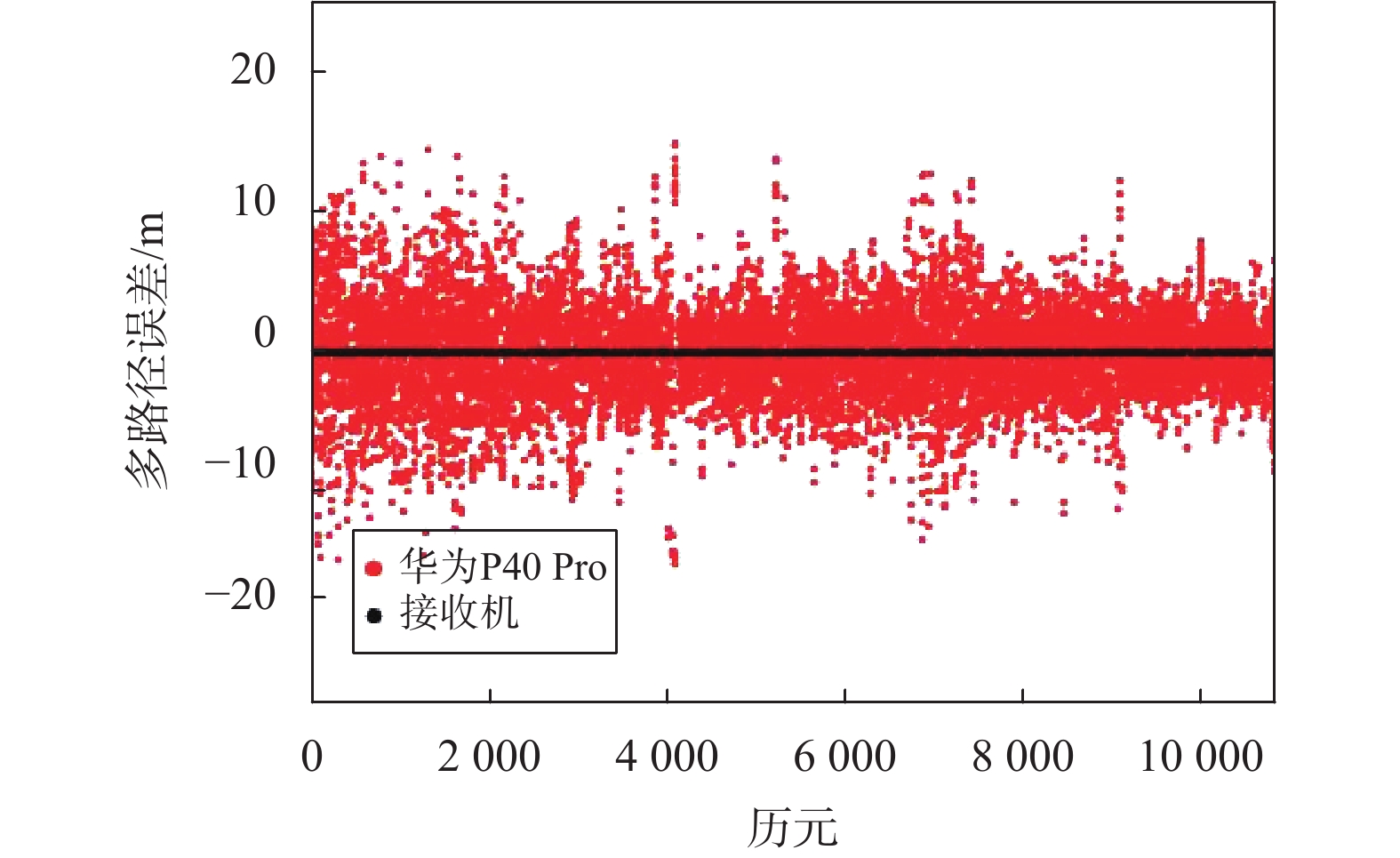
本文分别使用华为Mate30和华为P40 Pro双频GPS信号计算多路径误差,选取G04卫星数据分别对L1和L5频点进行计算. 将两台智能手机多路径误差与接收机UR4B0-D进行比较,计算得到G04卫星L1、L5频点的伪距多路径结果如图15~18所示.
计算各终端G04卫星多路径误差均方根(RMS),结果如表3所示. 华为Mate30从5 000历元开始数据噪声突然增大,导致多路径误差计算值增大,因此只分析前5 000历元的多路径误差. 由图15~18以及表3可知,智能手机的多路径误差远远大于接收机的多路径误差,而华为Mate30的多路径误差无论是L1频点还是L5频点均小于华为P40 Pro. 对比点L1和L5频点的多路径误差发现,接收机和华为Mate30在L5频点的多路径误差明显小于L1频点的多路径误差,华为P40 Pro在L5频点的多路径误差比L1频点的稍大. 可见L5频点一定程度上可以起到抑制多路径误差的作用. 总体来说,智能手机由于天线特点导致多路径误差很大,是影响智能手机高精度定位的主要误差.
表 3 不同终端G04卫星多路径误差m 终端型号 MP1_RMS MP5_RMS 北斗星通UR4B0-D 0.014 4 0.010 8 华为P40 Pro 3.227 9 3.424 2 华为Mate30(整体) 2.923 8 4.695 8 华为Mate30(前5 000历元) 2.124 1 1.816 7 华为Mate30(后5 800历元) 3.507 5 6.284 1 4. 结束语
本文使用三星S9+、华为Mate30和华为P40 Pro进行GNSS原始数据采集,并与北斗星通UR4B0-D接收机同步采集的数据进行对比,从可见卫星数、CNR、高度角、多路径误差等方面分析了智能手机的GNSS数据质量. 结果表明:与接收机相比,Andriod智能手机GNSS原始观测数据质量较差,且不同机型之间存在较大差异. Andriod智能手机的GNSS数据存在着数据缺失现象,导致可进行数据处理的卫星数目小于可见卫星数目. 对CNR和高度角进行分析后发现,智能手机的CNR较小,且没有表现出随高度角降低而减小的趋势. 对多路径误差进行分析,在L1频点上接收机的多路径误差RMS为0.014 4 m,华为Mate30为2.124 1 m,华为P40 Pro为3.227 9 m;而在L5频点上接收机的多路径误差RMS为0.010 8 m,华为Mate30为1.816 7 m,华为P40 Pro为3.424 2 m,可见多路径误差是影响智能手机高精度定位的主要误差,在将来的定位应用研究中应着重进行处理.
致谢:本文的研究得到了国家自然科学基金项目(41674034, 41974032)和中组部、中科院高层次青年人才项目以及王宽诚教育基金会的支持.
-
表 1 Android API时钟和测量类字段信息
字段名 所属类 描述 TimeNanos GNSSClock 手机硬件时间/ns BiasNanos GNSSClock 手机本地时钟与GPST亚纳秒级钟差/ns FullBiasNanos GNSSClock 手机本地时钟与GPST纳秒级钟差/ns DriftNanosPerSecond GNSSClock 钟漂/(ns·s−1) TimeOffsetNanos GNSSMeasurement 手机TimeNanos的偏差修正量/ns ConstellationType GNSSMeasurement 星座类型 Svid GNSSMeasurement 卫星编号 ReceivedSvTimeNanos GNSSMeasurement GNSS信号在卫星端的发射时间/ns AccumulatedDelataRange GNSSMeasurement 载波相位观测值/m Cn0DbHz GNSSMeasurement CNR/(dB·Hz) PseudorangeRatemeterperSecond GNSSMeasurement 伪距变化率 CarrierFrequencyHz GNSSMeasurement 载波频率  下载: 导出CSV
下载: 导出CSV
表 2 三款智能手机具体参数
手机型号 芯片型号 可接收卫星频点 三星S9+(Exynos) Broadcom BCM4775 GPS L1、Galileo E1、QZSS L1、GLONASS G1、BDS B1 华为P40 Pro Hisilicon Hi1105 GPS L1+L5、Galileo E1+E5a、QZSS L1+L5、GLONASS G1、BDS B1 华为Mate30 Hisilicon Hi1103 GPS L1+L5、Galileo E1+E5a、QZSS L1+L5、GLONASS G1、BDS B1
下载: 导出CSV
表 3 不同终端G04卫星多路径误差
m 终端型号 MP1_RMS MP5_RMS 北斗星通UR4B0-D 0.014 4 0.010 8 华为P40 Pro 3.227 9 3.424 2 华为Mate30(整体) 2.923 8 4.695 8 华为Mate30(前5 000历元) 2.124 1 1.816 7 华为Mate30(后5 800历元) 3.507 5 6.284 1
下载: 导出CSV
-
[1] 杨琪, 李四海, 刘洋. 开放GNSS原始测量对安卓平台定位精度影响分析[J]. 导航定位学报, 2019, 7(3): 115-120. DOI: 10.3969/j.issn.2095-4999.2019.03.019 [2] PESYNA K M, HEATH R W, HUMPHREY T E. Centimeter positioning with a smartphone-quality GNSS antenna[C]// The 27th International Technical Meeting of the Satellite Division of The Institute of Navigation, 2014: 1568-1577. http://hdl.handle.net/2152/63211
[3] KIRKKO-JAAKKOLA M, SÖDERHOLM S, HONKALA S, et al. Low-cost precise positioning using a national GNSS network[J]. The 28th International Technical Meeting of the Satellite Division of The Institute of Navigation , 2015: 2570-2577. http://hdl.handle.net/10138/224849
[4] HUMPHREYS T E, MURRIAN M, DIGGELEN F V, et al. On the feasibility of cm-accurate positioning via a smartphone's antenna and GNSS chip[C]//IEEE/ION Position, Location and Navigation Symposium (PLANS), 2016. DOI: 10.1109/PLANS.2016.7479707
[5] HÅKANSSON M. Characterization of GNSS observations from a nexus 9 Android tablet[J]. GPS solutions, 2019, 23(1): 21. DOI: 10.1007/s10291-018-0818-7
[6] PAZIEWSKI J, SIERADZKI R, BARYLA R. Signal characterization and assessment of code GNSS positioning with low-power consumption smartphones[J]. GPS solutions, 2019, 23(4): 98. DOI: 10.1007/s10291-019-0892-5
[7] RILEY S, LENTZ W, CLARE A. On the path to precision-observations with android GNSS observables[C]// The 30th International Technical Meeting of the Satellite Division of The Institute of Navigation, 2017: 116-129. DOI: 10.33012/2017.15244
[8] LIU Y S, GAO C F, CHEN B, et al. Pseudo-range single point and differential positioning accuracy test based on Android smartphone[C]//China Satellite Navigation Conference, 2019: 72-81. DOI: 10.1007/978-981-13-7751-8_8
[9] 陈波, 高成发, 刘永胜, 等. 安卓手机终端原始GNSS观测数据质量分析[J]. 导航定位学报, 2019, 7(3): 87-95. DOI: 10.3969/j.issn.2095-4999.2019.03.015 [10] 薄亚东, 王广兴, 余强, 等. 智能手机GNSS原始观测值质量与定位分析[C]//第十一届中国卫星导航年会论文集——S08测试评估技术, 2020. [11] 陈春花, 陈冲, 赵亚枝. 安卓智能手机GNSS数据质量分析[J]. 全球定位系统, 2020, 45(3): 22-27. -
期刊类型引用(7)
1. 李杰,杨东凯,洪学宝,王峰. GNSS线极化天线干涉信号反演土壤湿度算法测试. 北京航空航天大学学报. 2024(03): 874-885 .  百度学术
百度学术
2. 李仕辉,王虎,马宏阳,徐莹,任营营,王亚峰. 城市环境手机GNSS定位随机模型自适应构建方法. 测绘科学. 2024(03): 8-18 . 百度学术
3. 侯雪,张献志,叶远斌. 基于GDCORS的北斗终端高精度定位算法实现及性能分析. 地理空间信息. 2024(08): 72-75 . 百度学术
4. 孙俊锋,穆宏波,于先文,廖鹏,吴焱泽. 顾及系统误差影响的智能手机GNSS观测值质量分析. 测绘工程. 2024(05): 43-49 . 百度学术
5. 吴梦圈. 北斗卫星导航系统在智能手机大众市场规模化应用研究. 世界科技研究与发展. 2023(03): 338-348 . 百度学术
6. 关沧海,梁安宝,关辅兴,郑春雨,王晓波. 智能手机GNSS数据质量及定位精度分析. 测绘与空间地理信息. 2023(07): 19-22+25 . 百度学术
7. 张拓,叶世榕,夏朋飞,许晓东. Android智能手机联合高度角与信噪比的GPS/BDS定位随机模型研究. 大地测量与地球动力学. 2023(11): 1172-1177 . 百度学术
其他类型引用(7)






























计量
- 文章访问数: 947
- HTML全文浏览量: 1072
- PDF下载量: 143
- 被引次数: 14
