GNSS World of China
GNSS World of China
| Citation: | LIU Dongliang, CHENG Fang, SHEN Pengli, LI Xiaowan, HU Yuhang. LSTM assisted in vehicle GNSS/INS integrated navigation algorithm and performance analysis[J]. GNSS World of China, 2023, 48(5): 21-31. doi: 10.12265/j.gnss.2023111

|

| [1] |
CHEN K, CHANG G, CHEN C. GINav: a MATLAB-based software for the data processing and analysis of a GNSS/INS integrated navigation system[J]. GPS solutions, 2021, 25(3): 1-7. DOI: 10.1007/s10291-021-01144-9
|
| [2] |
BITAR N A, GAVRILOV A, KHALAF W. Artificial intelligence based methods for accuracy improvement of integrated navigation systems during GNSS signal outages: an analytical overview[J]. Gyroscopy and navigation, 2020, 11(1): 41-58. DOI: 10.1134/S2075108720010022
|
| [3] |
EL-SHEIMY N, CHIANG K W, NOURELDIN A. The utilization of artificial neural networks for multisensor system integration in navigation and positioning instruments[J]. IEEE transactions on instrumentation and measurement, 2006, 55(5): 1606-1615. DOI: 10.1109/TIM.2006.881033
|
| [4] |
SHARAF R, NOURELDIN A. Sensor integration for satellite-based vehicular navigation using neural networks[J]. IEEE transactions on neural networks, 2007, 18(2): 589-594. DOI: 10.1109/TNN.2006.890811
|
| [5] |
鲍泳林, 李皓, 袁鸣, 等. 基于神经网络的INS/GPS组合导航误差补偿研究[J]. 弹箭与制导学报, 2019, 39(2): 55-59.
|
| [6] |
赵乐宁, 李杰, 冯凯强, 等. GPS失锁时的RBF神经网络辅助组合导航算法[J]. 航天控制, 2022, 40(3): 37-43.
|
| [7] |
王超, 周军, 黄浩乾, 等. BP神经网络辅助的SINS/GPS组合导航姿态误差补偿方法研究[J]. 电子器件, 2021, 44(4): 987-993. DOI: 10.3969/j.issn.1005-9490.2021.04.041
|
| [8] |
XU Y, WANG K, JIANG C H, et al. Motion-Constrained GNSS/INS integrated navigation method based on BP neural network[J]. Remote sensing, 2023, 15(1): 154. DOI: 10.3390/rs15010154
|
| [9] |
闫世霖, 吴德伟, 王伟, 等. 循环神经网络辅助GNSS/SINS组合导航方法及性能分析[J]. 空军工程大学学报(自然科学版), 2021, 22(5): 61-66,81.
|
| [10] |
严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019.
|
| [11] |
陈凯. GNSS/INS组合导航软件开发[D]. 徐州: 中国矿业大学, 2022.
|
| [12] |
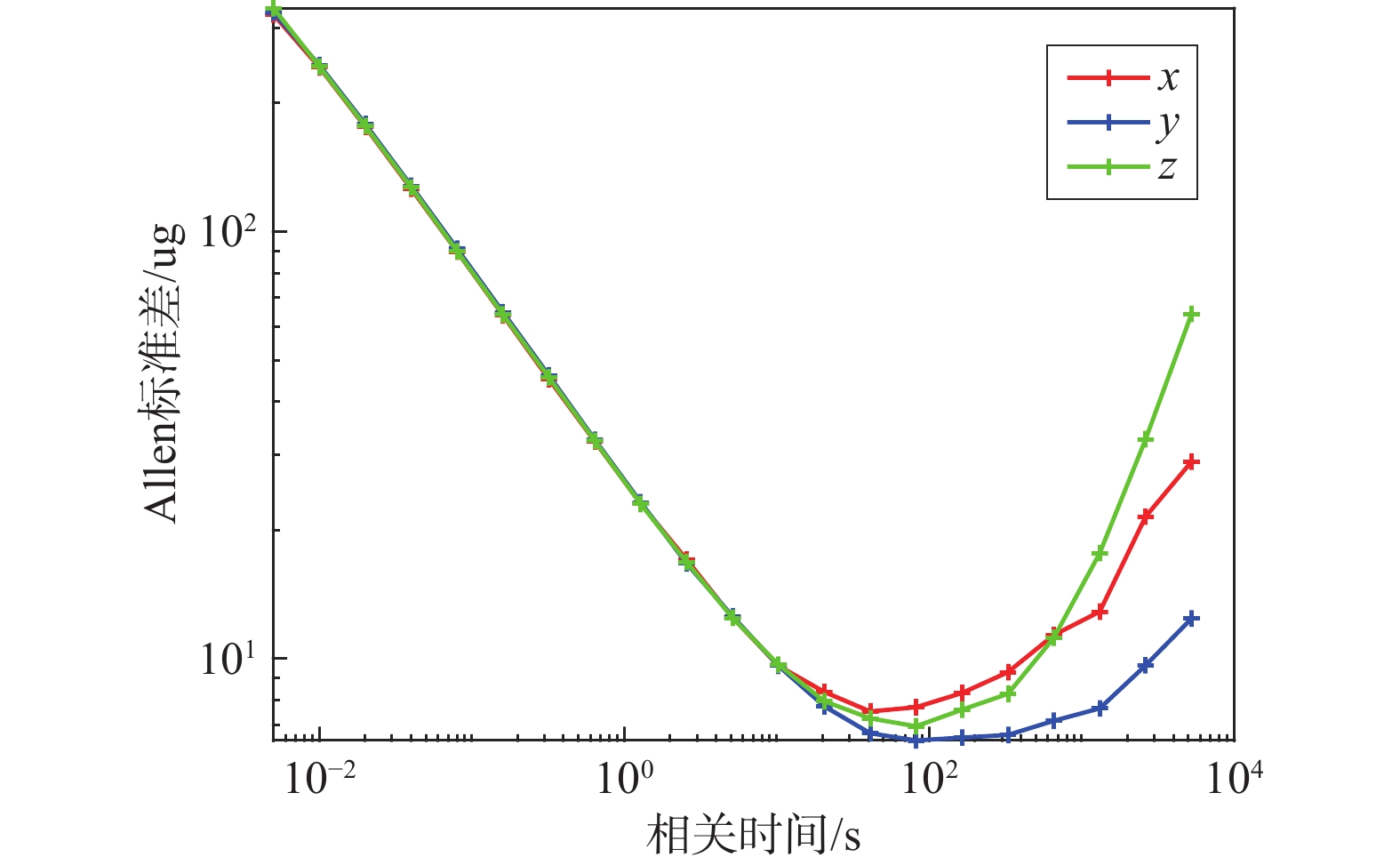
严恭敏, 李梓阳, 朱宏堡. 基于Allan方差分析的陀螺仪漂移误差辨识与仿真复现[J]. 导航定位学报, 2022, 10(4): 29-33.
|
Figures(18) / Tables(9)
Copyright © 2009《 GNSS World of China 》 Editorial Office
Address:84 Jianshe Dong Lu, Muye District, Xinxiang City, Henan Province, ChinaChina Pos:453000Tel:0373-3712411Fax:0373-3052232Email:qqdwxt@126.com
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: