2021, 46(2): 104-110.
doi: 10.12265/j.gnss.2020120802
Abstract:
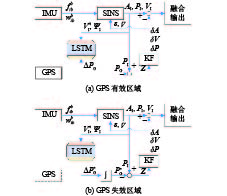
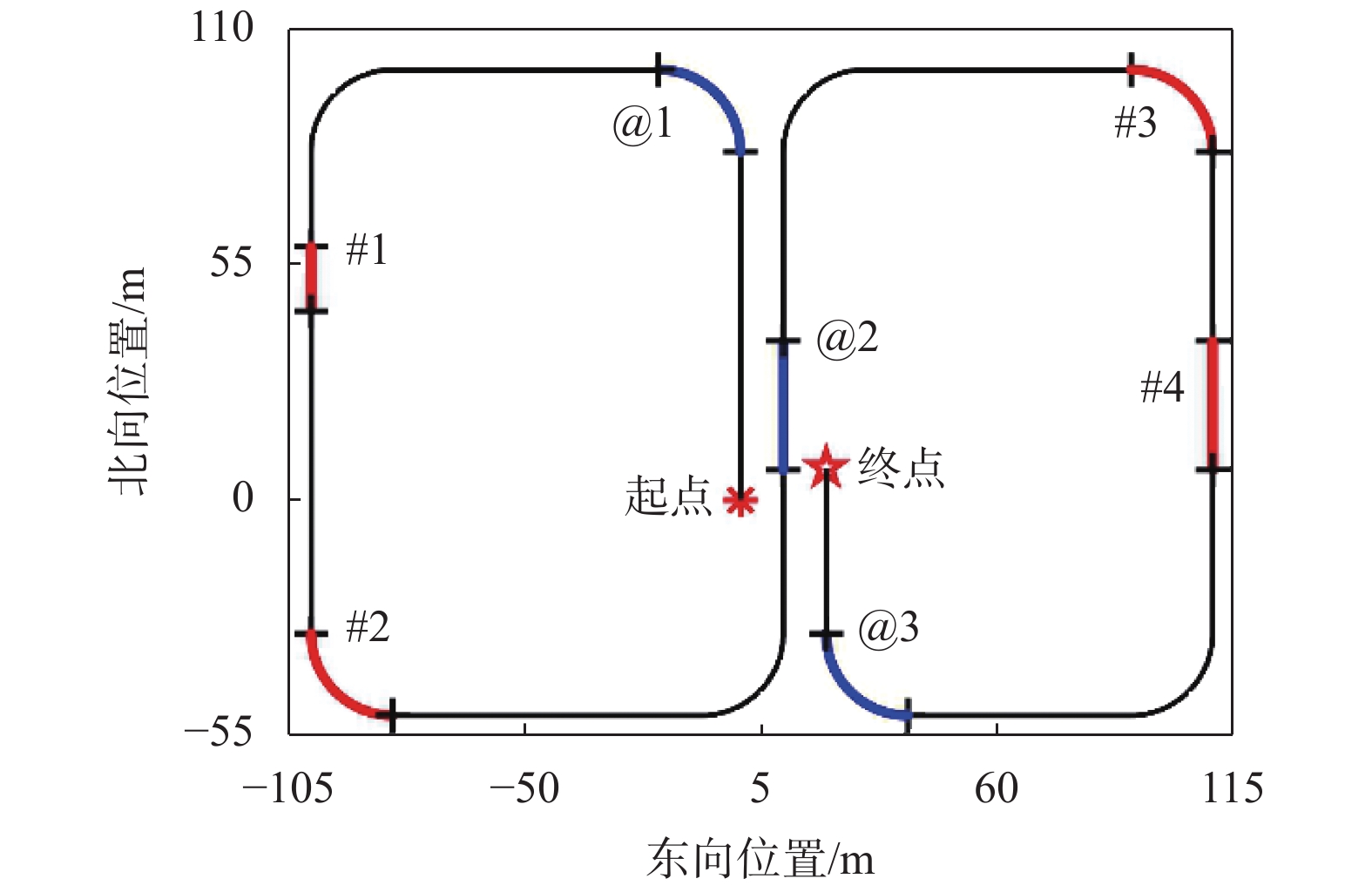
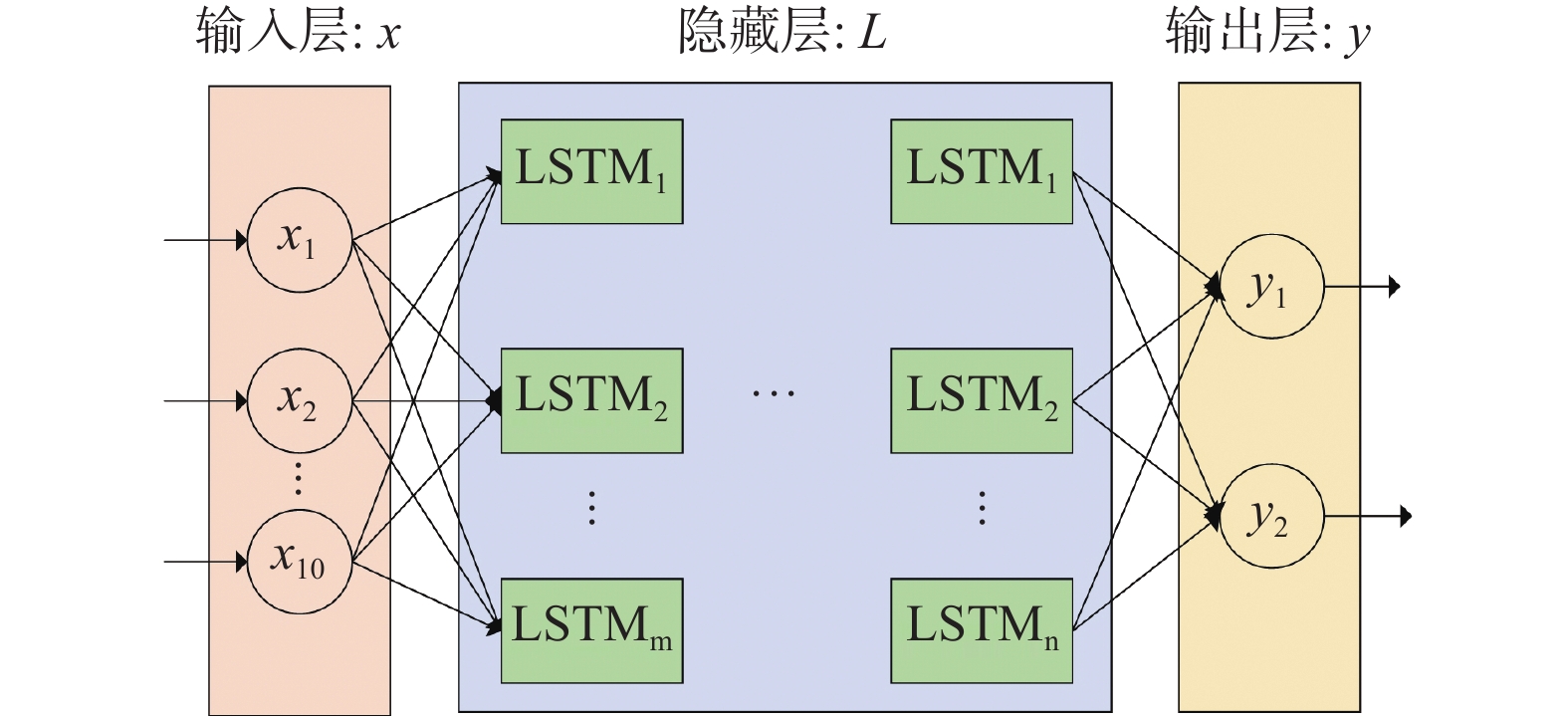
In cadastral surveying, a single system cannot meet the positioning requirements, and combined positioning technology has emerged. Among them, the strapdown inertial positioning system (SINS) and the GPS combined positioning are most widely used. In areas where satellite signals are interfered and failed, the system enters the pure SINS solution, and the positioning error will gradually accumulate and cannot meet the positioning accuracy requirements. In response to this problem, this paper proposes a combined positioning algorithm assisted by long and short-term memory (LSTM) neural network. According to the characteristics of LSTM neural network that can be effectively applied to long-distance time series, in the GPS effective area, the Kalman filtering (KF) algorithm is used to compare SINS/ GPS signal data fusion to obtain precise positioning information, while using inertial measurement unit (IMU), GPS and SINS output information is used to train the neural network; in the GPS failure area, the trained neural network to predict GPS location information is used, so that the system can continue filter with Kalman filter. Finally, combined with the characteristics of cadastral measurement, a simulation experiment was designed to prove that the algorithm can effectively suppress system error divergence and improve positioning accuracy when GPS signal fails, and it can still meet positioning accuracy requirements under different motion states with strong robustness.