

GNSS/IMU/LiDAR fusion positioning research
-
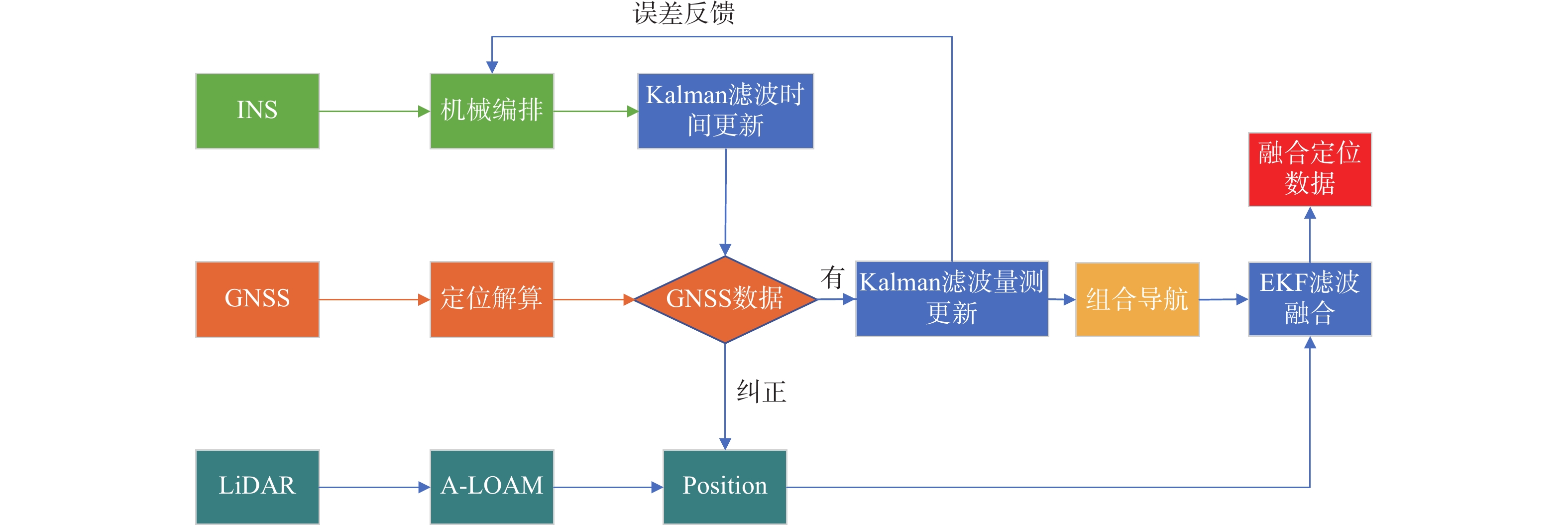
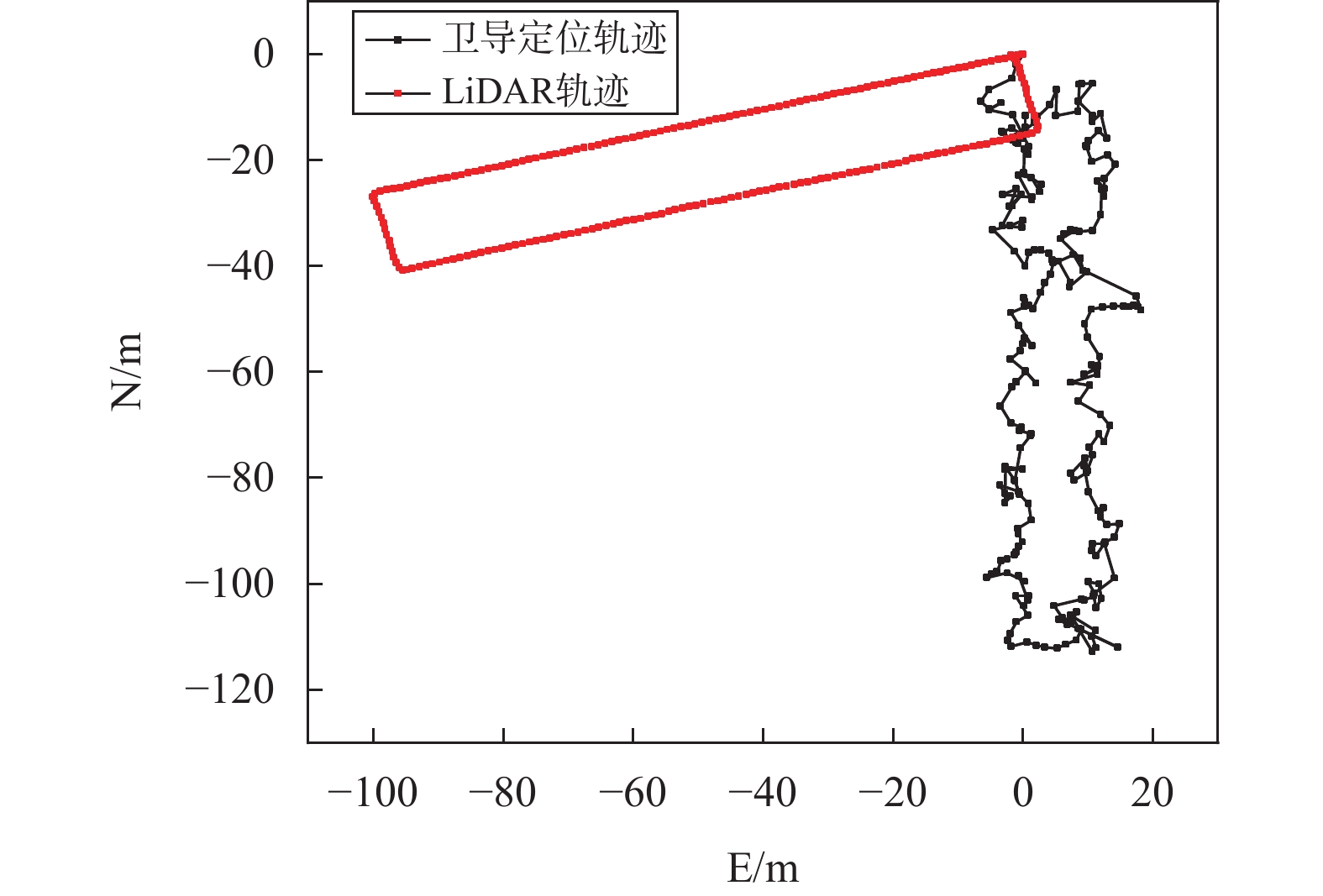
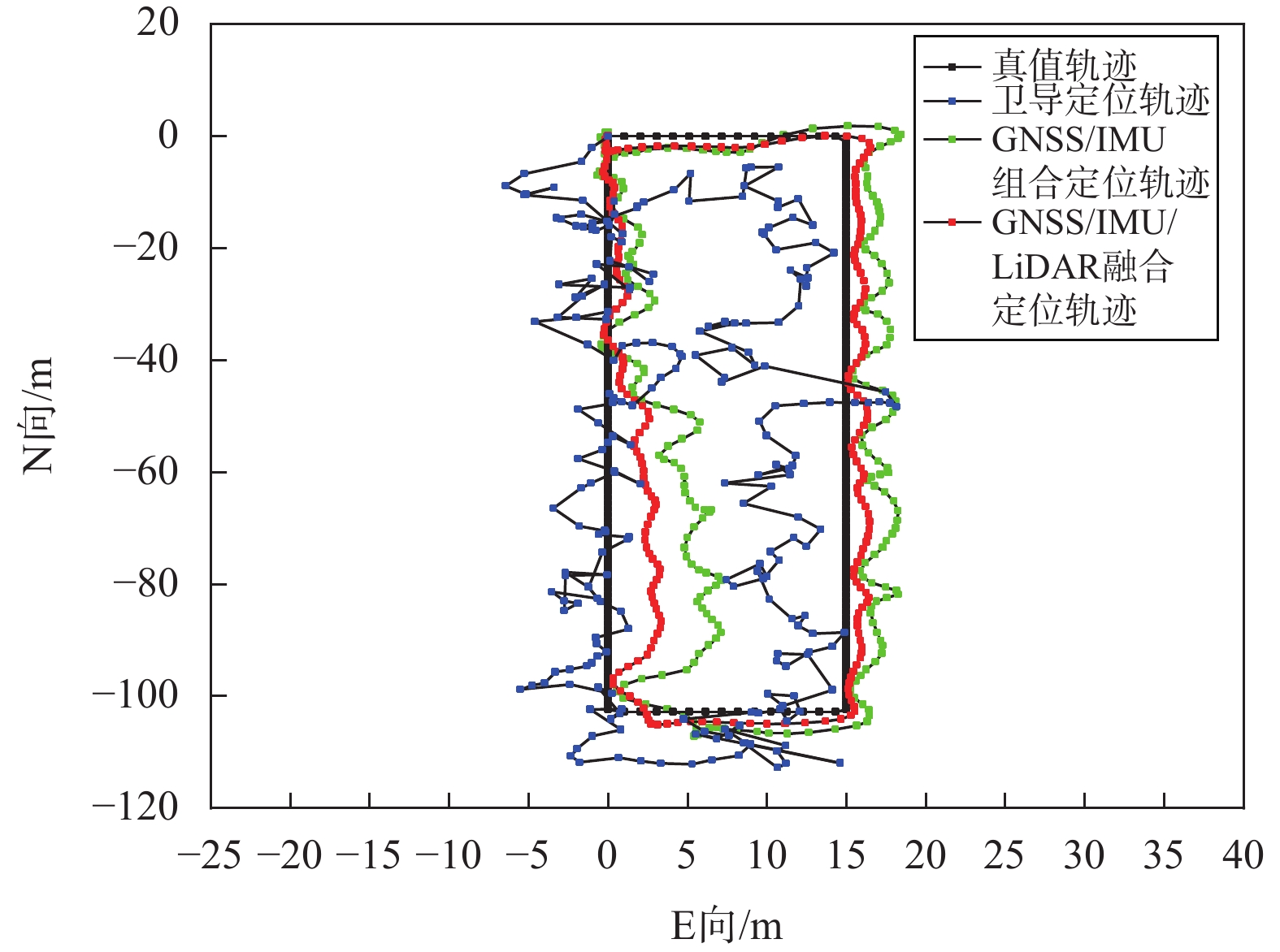
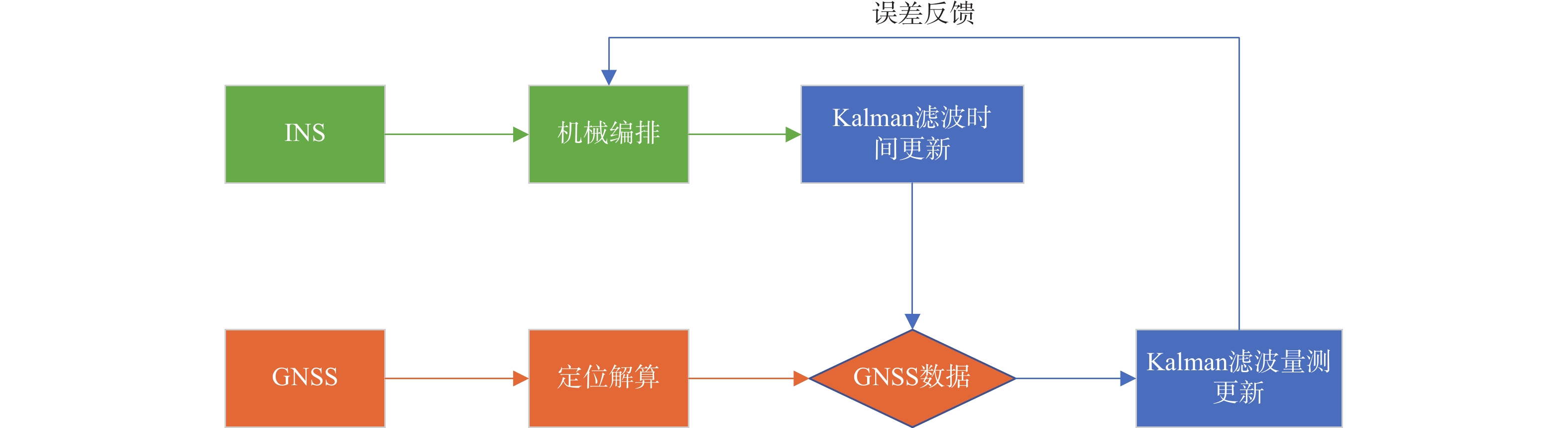
摘要: 为提升低成本卫星接收机和惯性测量单元(inertial measurement unit,IMU)条件下传统组合导航定位的抗干扰性和定位精度,本文通过融合GNSS、IMU、激光雷达(laser radar,LiDAR)来提高定位的鲁棒性及定位精度. 在高楼遮挡等复杂环境下由于卫星信号丢失导致卫星定位结果降低,可通过IMU与GNSS的融合提升导航定位的鲁棒性及其精度. 如果卫星信号缺失时间过长,低成本条件下的IMU/GNSS组合定位精度仍不理想,本文提出利用LiDAR里程计输出的位置信息与传统组合导航通过扩展卡尔曼滤波(extended Kalman filter,EKF)进行融合定位. 实验得出:在无遮挡的环境下融合定位标准差(standard deviation,STD)精度较之卫星定位提升53.7%,均方根误差(root mean square error,RMSE)精度提升56%,较之GNSS/IMU组合定位STD精度提升37.9%,RMSE精度提升38.6%. 在有遮挡的环境下融合定位STD精度较之卫星定位提升59.4%,RMSE精度提升71.3%,较之GNSS/IMU组合定位STD精度提升26.3%,RMSE精度提升33.7%.
-
关键词:
- 定位 /
- GNSS /
- 惯性测量单元(IMU) /
- 激光雷达(LiDAR) /
- 扩展卡尔曼滤波(EKF)
Abstract: To improve the anti-interference and positioning accuracy of conventional integrated navigation and positioning under the conditions of low-cost satellite receivers and IMU, this paper proposes to fuse GNSS, inertial measurement unit (IMU), and laser radar (LiDAR) to enhance the robustness and accuracy of positioning. In complex environments such as high-rise buildings, where satellite signals are lost, the robustness and accuracy of navigation and positioning can be improved by fusing IMU and GNSS. However, if the satellite signal loss time is too long, the IMU/GNSS integrated positioning accuracy under low-cost conditions is still not ideal. This paper proposes to use the position information output by the LiDAR odometer and the conventional integrated navigation to perform fusion positioning through extended Kalman filter (EKF). The experiments show that in the unobstructed environment, the fusion positioning standard deviation (STD) accuracy is 53.7% higher than the satellite positioning, the root mean square error (RMSE) accuracy is 56% higher, the fusion positioning STD accuracy is 37.9% higher than the GNSS/IMU integrated positioning, and the RMSE accuracy is 38.6% higher. In the obstructed environment, the fusion positioning STD accuracy is 59.4% higher than the satellite positioning, the RMSE accuracy is 71.3% higher, the fusion positioning STD accuracy is 26.3% higher than the GNSS/IMU integrated positioning, and the RMSE accuracy is 33.7% higher.-
Key words:
- position /
- GNSS /
- inertial measurement unit (IMU) /
- laser radar (LiDAR) /
- extended Kalman filter (EKF)
-
表 1 产品参数及其数据
产品 参数 技术数据 IMU 量程 $ \left(A\right)\pm 2~\pm 16\;\mathrm{g} $ $ \left(G\right)\pm 125~\pm 2000\;\mathrm{d}\mathrm{p}\mathrm{s} $ 零偏 $ \left(A\right)\pm 20\;\mathrm{m}\mathrm{g} $ $ \left(G\right)\pm 0.5\;\mathrm{d}\mathrm{p}\mathrm{s} $ 灵敏度误差 $ \left(A\right)\pm 0.4 \text{%} $ $ \left(G\right)\pm 0.4 \text{%} $ 噪声密度 $ \left(A\right)\pm 160\; \text{µ} \mathrm{g}\surd \mathrm{H}\mathrm{z} $ $ \left(G\right)\pm 0.008\;\mathrm{d}\mathrm{p}\mathrm{s}/\surd \mathrm{H}\mathrm{z} $ 卫星接收机 E向定位精度(SPP) 4.904 6 m N向定位精度(SPP) 6.003 3 m U向定位精度(SPP) 12.939 0 m LiDAR 定位精度 2.833 3 m  下载: 导出CSV
下载: 导出CSV
表 2 导航定位坐标解算STD及其精度提升
环境 实验次序 卫星定位/m GNSS/IMU
组合定位/mGNSS/IMU/LiDAR
融合定位/m精度提升
(卫星定位)/%精度提升
(组合定位)/%无遮挡 第一次 4.345 1 3.624 7 1.982 2 54.4 45.3 第二次 4.209 3 4.236 6 2.932 5 30.3 30.8 第三次 4.479 7 2.525 0 1.710 8 61.8 32.2 第四次 5.176 8 3.181 9 1.806 8 65.1 43.2 平均值 4.552 7 3.392 1 2.108 1 53.7 37.9 有遮挡 第五次 8.276 1 3.606 9 2.643 7 68.1 26.7 第六次 6.775 4 3.420 4 2.766 8 59.2 19.1 第七次 3.788 4 3.345 8 2.237 9 40.9 33.1 平均值 6.280 0 3.457 7 2.549 5 59.4 26.3
下载: 导出CSV
表 3 导航定位坐标解算RMSE及其精度提升
环境 实验次序 卫星定位/m GNSS/IMU
组合定位/mGNSS/IMU/LiDAR
融合定位/m精度提升
(卫星定位)/%精度提升
(组合定位)/%无遮挡 第一次 9.163 4 4.783 8 2.522 7 72.5 47.3 第二次 6.638 4 5.086 9 3.968 8 40.2 22.0 第三次 7.198 0 6.704 7 4.262 5 40.8 36.4 第四次 6.264 2 4.405 5 2.123 0 66.1 51.8 平均值 7.316 0 5.245 2 3.219 3 56.0 38.6 有遮挡 第五次 14.526 1 4.456 3 2.680 1 81.5 39.9 第六次 12.223 1 6.028 3 4.789 0 60.8 20.6 第七次 14.390 7 7.330 5 4.341 1 69.8 40.8 平均值 13.713 3 5.938 4 3.936 7 71.3 33.7
下载: 导出CSV
-
[1] KINDERVATTER T H, TEIXEIRA F L. Tropospheric and ionospheric effects on Global Navigation Satellite Systems[M]. John Wiley & Sons, 2022. [2] ERSHAD M, ALI E. Global Positioning System (GPS): definition, principles, errors, applications & DGPS[J/OL]. [2023-12-23]. 2020. https://doc.taixueshu.com/foreign/rgPres2020129418177.html [3] GROVES P D. Principles of GNSS, inertial, and multisensor integrated navigation systems, [Book review][J]. IEEE aerospace and electronic systems magazine, 2015, 30(2): 26-27. DOI: 10.1109/MAES.2014.14110 [4] 李正帅, 缪玲娟, 周志强, 等. GNSS/SINS组合导航中多路径效应的识别与抑制算法[J]. 导航定位与授时, 2022, 9(4): 85-92. [5] 金耀, 周又眉, 张贺, 等. 北斗+5G融合定位技术研究及应用进展[J]. 全球定位系统, 2023, 48(4): 12-18. DOI: 10.12265/j.gnss.2023091 [6] VANA S, BISNATH S. Enhancing navigation in difficult environments with low-cost, dual-frequency GNSS PPP and MEMS IMU[C]//International Association of Geodesy., General Assembly, 2022: 143-150. DOI: 10.1007/1345_2020_118 [7] SUN X, ZHUANG Y, CHEN S, et al. Tightly-coupled RTK/ins integrated navigation using a low-cost GNSS receiver and a MEMS IMU[J]. The international archives of the photogrammetry, remote sensing and spatial information sciences, 2022(46): 185-190. DOI: 10.5194/isprs-archives-xlvi-3-w1-2022-185-2022 [8] YUAN Y L, LI F, CHEN J L, et al. An improved Kalman filter algorithm for tightly GNSS/INS integrated navigation system[J]. Mathematical biosciences and engineering, 2024, 21(1): 963-983. DOI: 10.3934/mbe.2024040 [9] LI X X, HUANG J X, LI X, et al. Review of PPP–RTK: achievements, challenges, and opportunities[J]. Satellite navigation, 2022, 3(1): 28. DOI: 10.1186/s43020-022-00089-9 [10] FENG Y H, HUANG G W, LI X, et al. Adaptive BDS/MEMS INS navigation algorithm for low-dynamic carrier based on motion characteristics detection and dual-antenna Position/Velocity constraints[J]. Measurement, 2024, 225: 114037. DOI: 10.1016/j.measurement.2023.114037 [11] 冯祎, 涂锐, 韩军强, 等. 一种GNSS/视觉观测紧组合导航定位算法研究[J]. 全球定位系统, 2021, 46(6): 49-54. [12] 张哲浩, 潘林. 多系统融合单点定位先验和验后定权研究[J]. 全球定位系统, 2021, 46(3): 1-6. DOI: 10.12265/j.gnss.2021010401 [13] ZHANG J, SINGH S. LOAM: Lidar odometry and mapping in real-time[C]//Robotics: Science and Systems. 2014, 2(9): 1-9. DOI: 10.15607/RSS.2014.X.007 [14] 严恭敏. 捷联惯导算法及车载组合导航系统研究[D]. 西安: 西北工业大学, 2004. [15] 严恭敏, 杨小康, 翁浚, 等. 一种无误差的捷联惯导数值更新新算法[J]. 导航定位学报, 2018, 6(2): 20-22,35. [16] 秦永元. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 2021. [17] 刘席天. 城市半遮蔽环境下GNSS/INS组合导航算法设计与实现[D]. 徐州: 中国矿业大学, 2023. [18] 王甫红, 栾梦杰, 程雨欣, 等. 城市环境下智能手机车载GNSS/MEMS IMU紧组合定位算法[J]. 武汉大学学报(信息科学版), 2023, 48(7): 1106-1116. -


 点击查看大图
点击查看大图
图(5) / 表(3)
计量
- 文章访问数: 64
- HTML全文浏览量: 14
- PDF下载量: 3
- 被引次数: 0
