

Improved algorithm for tree height extraction based on sparse and dense image matching with epipolar constraints
-
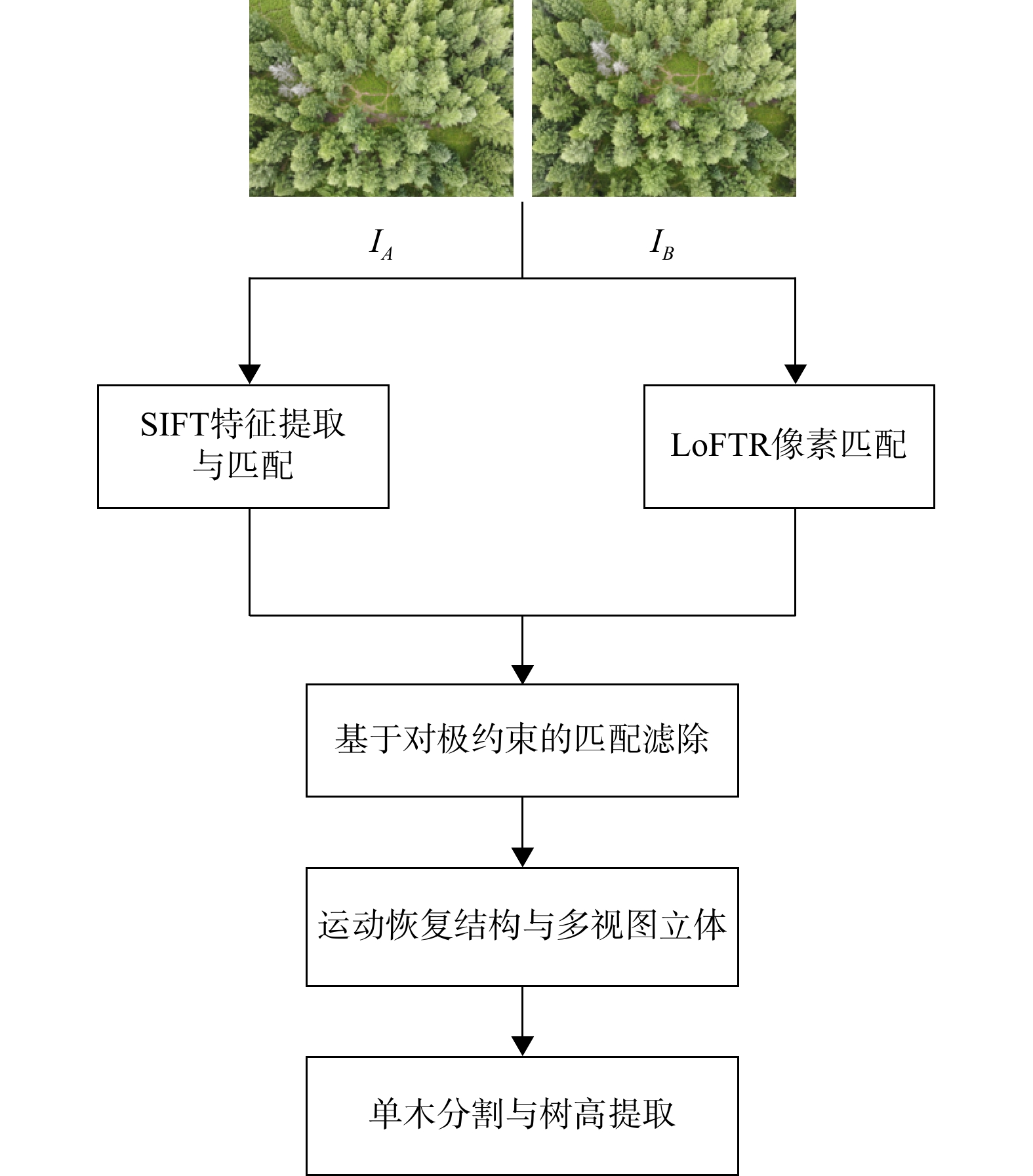
摘要: 树高是监测森林状况的重要参数,摄影测量法具有低成本、灵活的特性,是树高采集的重要方法之一. 作为一种被动遥感方式,传统的摄影测量方法往往需要数量较多,重叠率较高的图像数据,这与传统图像特征的稀疏性有关. 为了提高图像数量受限条件下的树高提取精度,提出将稀疏特征匹配和稠密像素匹配相结合,并使用对极约束过滤外点的方法,得到稠密且精度较高的匹配结果,并通过三维重建算法得到森林场景点云. 该方法在少量图像的情况下就可以较为完整地重建森林场景并提取树高,将提取的树高与机载激光雷达(light detection and ranging,LiDAR)点云的结果进行对比,相关系数为0.91,最大误差为1.64 m. 该算法只需要少量的重叠图像,这表明了该算法在处理高分辨率卫星图像方面具有一定潜力.Abstract: Tree height is a crucial parameter for monitoring forest conditions,and photogrammetry stands out as an essential method for tree height acquisition due to its low cost and flexibility. As a passive remote sensing approach, the traditional photogrammetric method often requires a substantial quantity of images with high overlap, which is associated with the sparsity of traditional image features. To enhance tree height extraction accuracy under limited image availability, a proposed approach combines sparse feature matching with dense pixel matching, by employing the epipolar constraint to filter outliers, dense and highly accurate matching results are obtained. The three-dimensional reconstruction algorithm is then applied to generate a point cloud representing the forest scene. This method demonstrates the capability to reconstruct the forest scene comprehensively and extract tree heights even with a small number of images. Comparison with results from LiDAR point clouds yields a correlation coefficient of 0.91 and a maximum error of 1.64 meters. Notably, the algorithm requires only a small number of overlapping images, indicating its potential in handling high-resolution satellite imagery.
-
表 1 树高对比结果
统计指标 值 相关系数 0.91 最大误差/m 1.64 最小误差/m 0.03 平均误差/m 0.91 LiDAR点云中提取的最大树高/m 21.60 LiDAR点云中提取的最小树高/m 16.70  下载: 导出CSV
下载: 导出CSV
-
[1] FILIPPELLI S K, LEFSKY M A, ROCCA M E. Compa-rison and integration of lidar and photogrammetric point clouds for mapping pre-fire forest structure[J]. Remote sen-sing of environment, 2019, 224: 154-166. DOI: 10.1016/j.rse.2019.01.029 [2] PULITI C S. Structure from motion photogrammetry in forestry: a review[J]. Current forestry reports, 2019, 5(3): 155-168. DOI: 10.1007/s40725-019-00094-3 [3] SWAYZE N C, TINKHAM W T, VOGELER J C, et al. Influence of flight parameters on UAS-based monitoring of tree height, diameter, and density[J]. Remote sensing of environment:an interdisciplinary journal, 2021, 263(5): 112540. DOI: 10.1016/j.rse.2021.112540 [4] SCHÖNBERGER J L, FRAHM J M. Structure-from-mot-ion revisited[C]//The IEEE Conference on Computer Vision and Pattern Recognition. 2016: 4104-4113. DOI: 10.1109/cvpr.2016.445 [5] SCHÖNBERGER J L, ZHENG E, FRAHM J M, et al. Pixelwise View Selection for Unstructured Multi-view Stereo[C]//Computer Vision–ECCV 2016: 14th European Conference, 2016: 501-518. DOI: 10.1007/978-3-319-46487-9_31 [6] MOULON P, MONASSE P, PERROT R, et al. Openmvg: open multiple view geometry[C]//Reproducible Research in Pattern Recognition: First International Workshop, 2017: 60-74. DOI: 10.1007/978-3-319-56414-2_5 [7] LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International journal of computer vision, 2004, 60(2): 91-110. DOI: 10.1023/b:visi.0000029664.99615.94 [8] 徐锦乐, 潘树国, 高旺, 等. 基于惯性先验校正图像灰度的VIO前端改良方法[J]. 全球定位系统, 2023, 48(3): 102-109. DOI: 10.12265/j.gnss.2023067 [9] DETONE D, MALISIEWICZ T, RABINOVICH A. Sup-erpoint: Self-supervised interest point detection and descri-ption[C]//The IEEE Conference on Computer Vision and Pattern Recognition Workshops. 2018: 224-236. DOI: 10.1109/cvprw.2018.00060 [10] TYSZKIEWICZ M, FUA P, TRULLS E. DISK: learning local features with policy gradient[J]. Advances in neural information processing systems, 2020, 33: 14254-14265. DOI: 10.48550/arXiv.2006.13566 [11] SUN J, SHEN Z, WANG Y, et al. LoFTR: detector-free local feature matching with transformers[C]//The IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 8922-8931. DOI: 10.1109/cvpr46437.2021.00881 [12] EDSTEDT J, ATHANASIADIS I, WADENBÄCK M, et al. DKM: dense kernelized feature matching for geometry estimation[C]//The IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 17765-17775. DOI: 10.1109/cvpr52729.2023.01704 [13] VASWANI A, SHAZEER N, PARMAR N, et al. Attenti-on is all you need[J]. Advances in neural information proc-essing systems, 2017, 30. DOI: 10.48550/arXiv.1706.03762 [14] SARLIN P E, DETONE D, MALISIEWICZ T, et al. Su-perglue: learning feature matching with graph neural net-works[C]//The IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 4938-4947. DOI: 10.1109/cvpr42600.2020.00499 [15] LINDENBERGER P, SARLIN P E, POLLEFEYS M. LightGlue: local feature matching at light speed[C]//TEEE/CVF International Conference on Computer Vision, 2023: 17581-17592. DOI: 10.1109/ICCV51070.2023.01616 [16] HARTLEY R, ZISSERMAN A. Multiple view geometry in computer vision[M]. Cambridge university press, 2003. [17] BARATH D, NOSKOVA J, IVASHECHKIN M, et al. MAGSAC++, a fast, reliable and accurate robust estimator[C]//The IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 1304-1312. DOI: 10.1109/cvpr42600.2020.00138 [18] ZHAO X, GUO Q, SU Y, et al. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas[J]. ISPRS journal of photogrammetry and remote sensing, 2016, 117: 79-91. DOI: 10.1016/j.isprsjprs.2016.03.016 [19] LI W, GUO Q, JAKUBOWSKI M K, et al. A new method for segmenting individual trees from the lidar point cloud[J]. Photogrammetric engineering & remote sensing, 2012, 78(1): 75-84. DOI: 10.14358/pers.78.1.75 [20] DE FRANCHIS C, MEINHARDT-LLOPIS E, MICHEL J, et al. An automatic and modular stereo pipeline for push-broom images[J]. ISPRS annals of the photogrammetry, re-mote sensing and spatial information sciences, 2014, 2(3): 49-56. DOI: 10.5194/isprsannals-ii-3-49-2014 -




 点击查看大图
点击查看大图
图(4) / 表(1)
计量
- 文章访问数: 30
- HTML全文浏览量: 9
- PDF下载量: 3
- 被引次数: 0
