

LSTM assisted in vehicle GNSS/INS integrated navigation algorithm and performance analysis
-
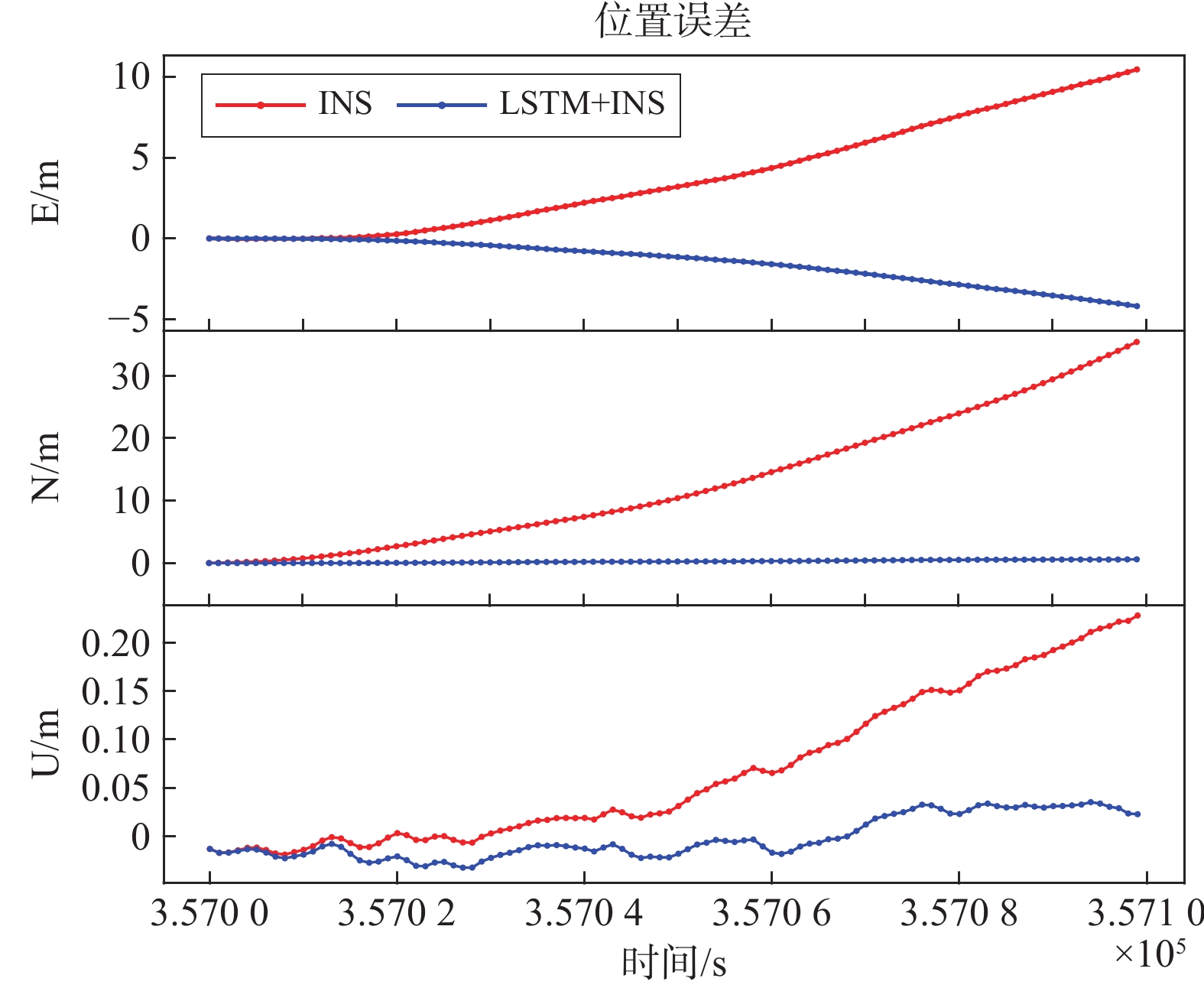
摘要: 针对车载GNSS/惯性导航系统(inertial navigation system,INS)组合导航系统在GNSS信号失锁时定位精度下降甚至发散的问题,提出了一种长短期记忆(long short-term memory,LSTM)神经网络辅助组合导航的算法来提高定位精度,实现可靠连续稳定的定位. 通过移动集成平台进行实验,结果表明:当GNSS信号失锁30 s时,LSTM辅助组合导航系统在东(east,E)、北(north,N)方向的位置误差最大值分别降低了77.45%、17.39%,均方根误差(root mean square error,RMSE)分别降低了79.53%、42.36%;当GNSS信号失锁100 s时,LSTM辅助GNSS/INS在E、N、天顶(up,U)三个方向上的位置误差最大值分别降低了60.07%、98.30%、84.65%,RMSE分别降低了61.96%、97.98%、84.65%. LSTM辅助较大地提升了车载GNSS/INS组合导航系统的导航性能.Abstract: Aiming at the problem that the positioning accuracy of the vehicle mounted GNSS/INS integrated navigation system declines or even diverges when the GNSS signal is unlocked, a new algorithm based on long short memory (LSTM) neural network assisted integrated navigation is proposed to improve the positioning accuracy and achieve reliable, continuous and stable positioning. The experiment was conducted on mobile integration platform, and the results showed that when the GNSS signal lost lock for 30 seconds, the maximum position error of the LSTM assisted integrated navigation system in the east and north directions decreased by 77.45% and 17.39%, respectively, and the root mean square error (RMSE) decreased by 79.53% and 42.36%, respectively; When the GNSS signal loses lock for 100 seconds, the maximum position error values of LSTM assisted GNSS/INS in the east, north, and sky directions decreased by 60.07%, 98.30%, and 84.65%, respectively, while RMSE decreased by 61.96%, 97.98%, and 84.65%. LSTM assistance greatly improves the navigation performance of the onboard GNSS/INS integrated navigation system.
-
表 1 实验设备表
设备名称 数量 备注 UR4B0-D 1 基准站 Trimble NetR9 1 移动站 惯导NAV300G 1 采集惯导数据 电源 1 为NAV300G供电 移动小车 1 - 功分器 1 传输卫星信号 Trimble天线 2 接受卫星信号 串口线、网口线、天线馈线 若干 连接线路 胶带 1 固定设备 IE8.7 1 提供参考真值 笔记本电脑 1 配置存储数据  下载: 导出CSV
下载: 导出CSV
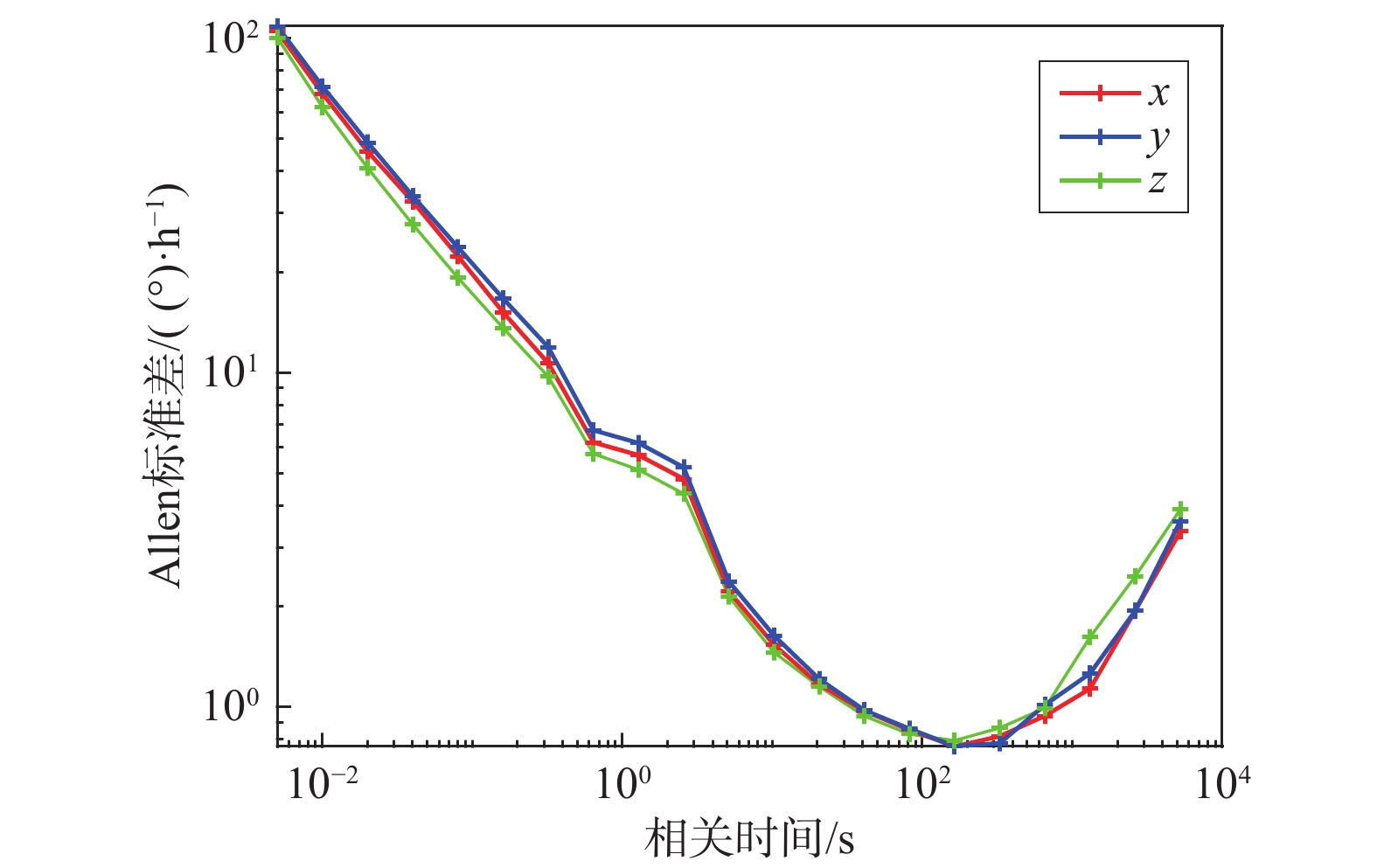
表 2 陀螺仪Allan方差分析结果
坐标轴 角度随机游走/
((°) $\cdot {\text{h} }^{-{\frac{1}{2} }}$)零偏稳定性/
((°) $ \cdot {\mathrm{h}}^{{-}1} $)角速率随机游走/
((°) $ \cdot {\text{h}}^{{-}\frac{3}{2}} $)X轴 0.108 5 1.143 9 4.694 3 Y轴 0.112 5 1.145 9 4.475 4 Z轴 0.092 5 1.190 8 4.972 1
下载: 导出CSV
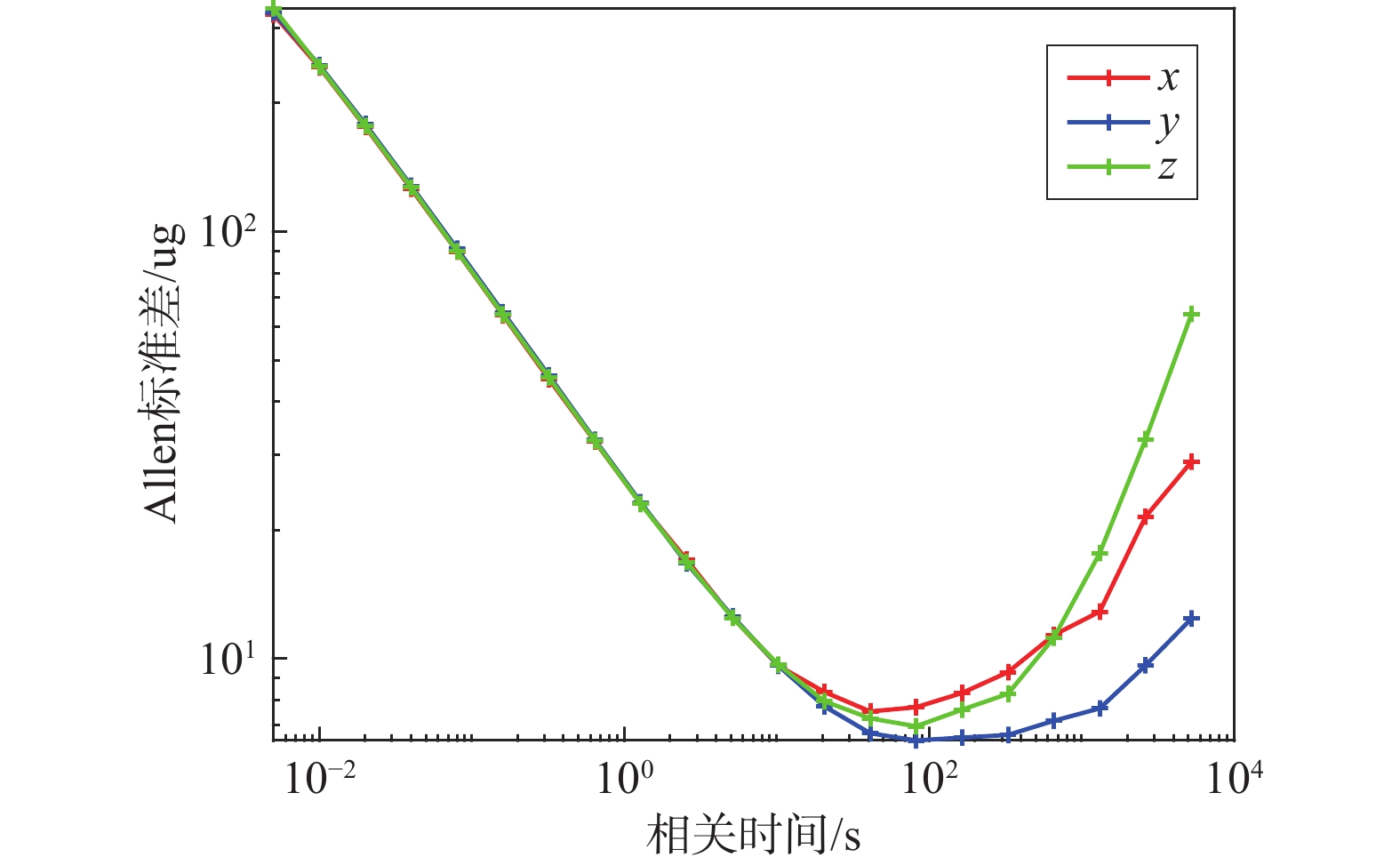
表 3 加速度计Allan方差分析结果
坐标轴 速度随机游走/
( ${\text{m} } \cdot { {\text{s} }^{-\frac{3}{2} } }$)零偏稳定性/
μg加速率随机游走/
( ${\text{m} } \cdot { {\text{s} }^{-\frac{5}{2} } }$)X轴 2.472 0×10−4 12 8.728 8×10−6 Y轴 2.511 6×10−4 12 6.221 4×10−6 Z轴 2.490 0×10−4 12 7.765 4×10−6
下载: 导出CSV
表 4 GNSS/INS组合数据处理模型与参数设置
参数 模型 待测设备 NetR9 +NAV300G 观测量 伪距、多普勒、载波相位、角速度、比力 观测量采样率 GNSS 1 Hz, IMU 200 Hz 卫星系统 BDS、GPS、Galileo 坐标系 WGS-84 卫星信号频点 B1I、L1、E1 卫星星历 广播星历 截止高度角 15° 模糊度固定算法 LAMBDA 测试条件 动态
下载: 导出CSV
表 5 训练参数设置
变量 具体数值 MaxEpochs 150 numHiddenUnits 100 MiniBatchSize 1 InitialLearnRate 0.001 LearnRateDropPeriod 50 LearnRateDropFactor 0.2
下载: 导出CSV
表 6 GNSS信号失锁30 s各时间段有无LSTM辅助组合导航位置误差对比
失锁时长/s INS位置误差/m LSTM+INS位置误差/m E N U 水平 E N U 水平 5 −0.127 −0.053 0.006 0.138 0.003 0.006 0.006 0.007 10 −0.389 −0.293 0.021 0.487 −0.035 −0.062 0.021 0.071 15 −0.906 −0.623 0.014 1.099 −0.127 −0.182 0.012 0.222 20 −1.715 −0.973 0.010 1.972 −0.297 −0.388 0.012 0.489 30 −3.894 −1.443 0.012 4.153 −0.878 −1.192 0.029 1.480
下载: 导出CSV
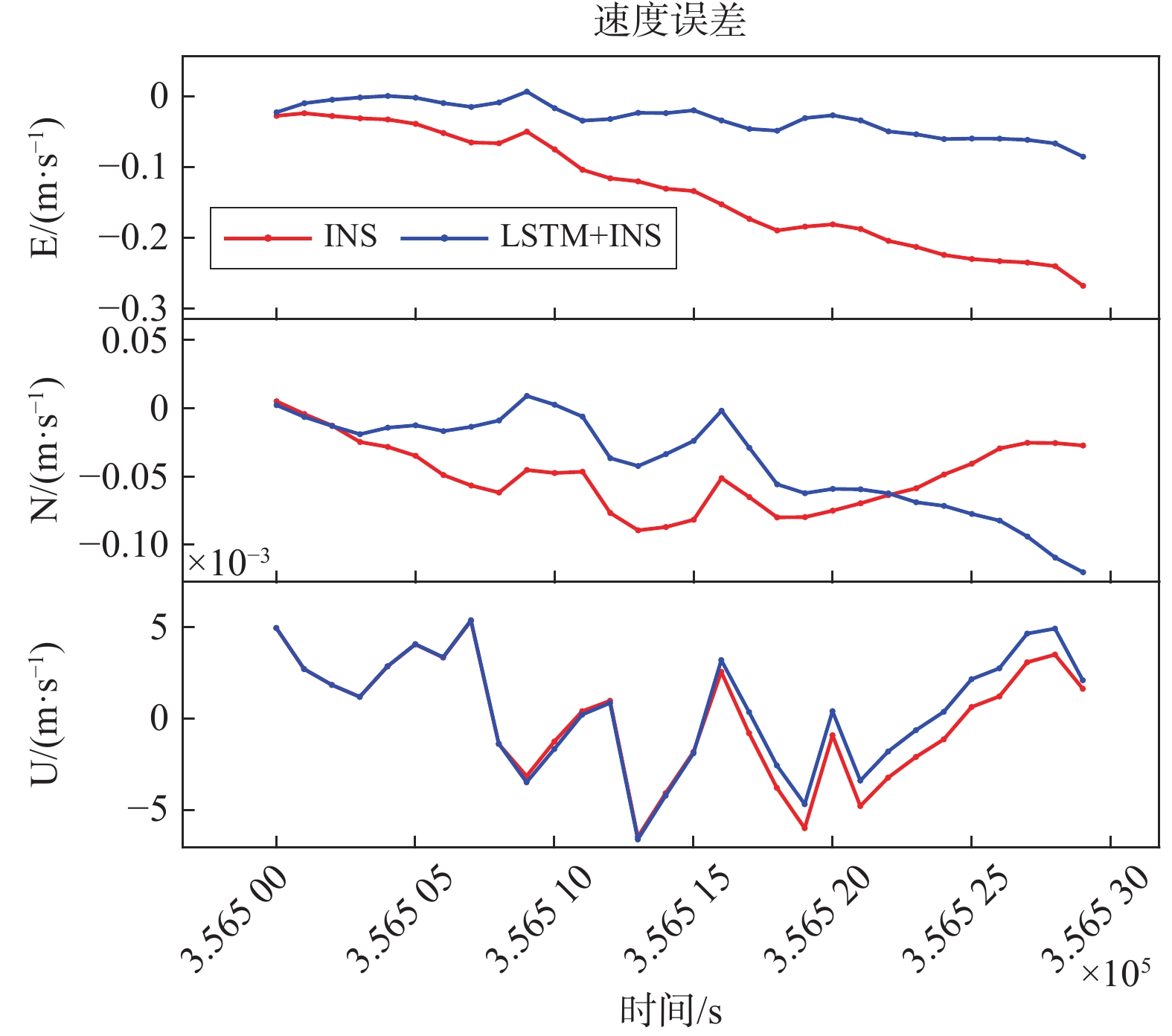
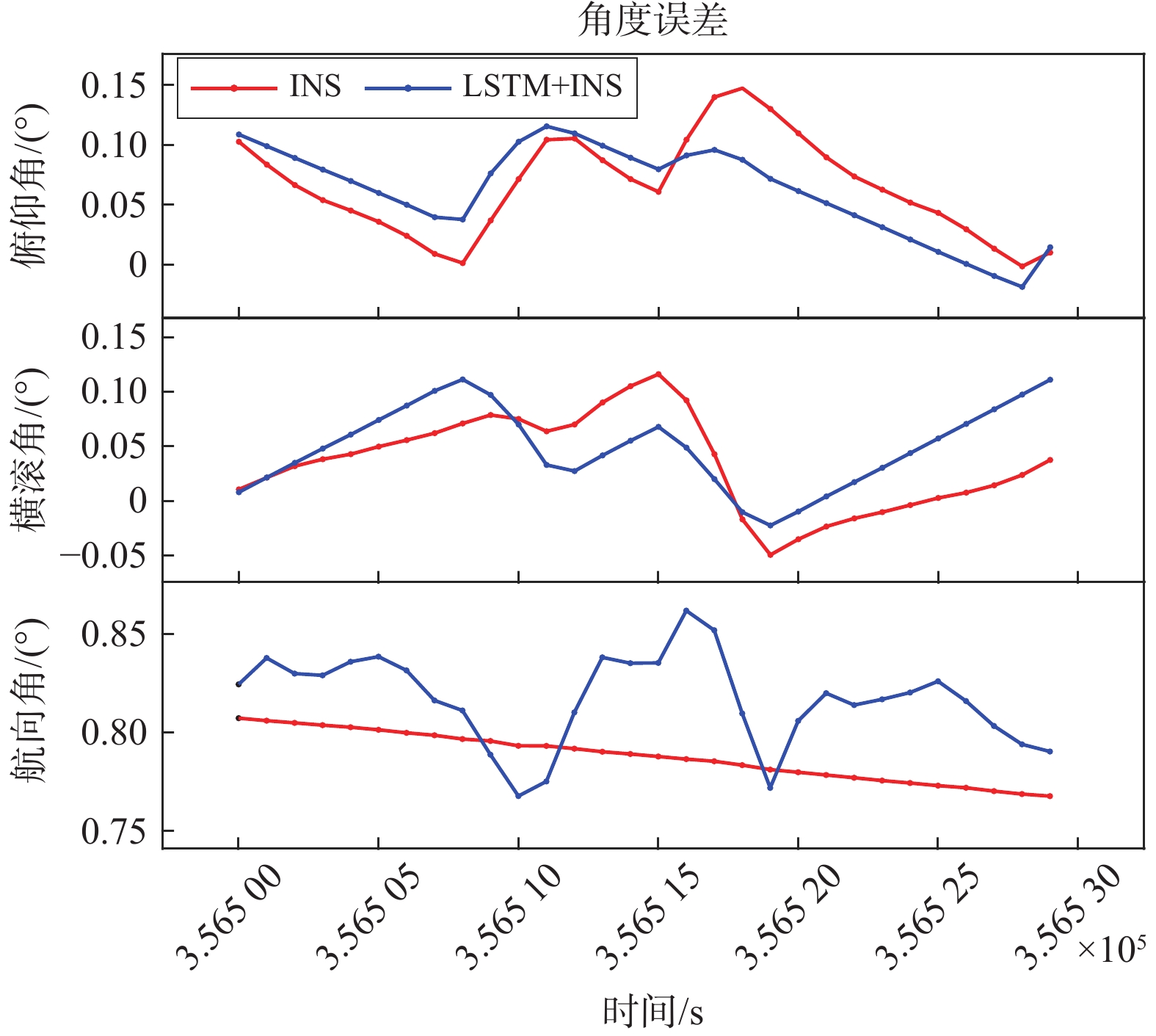
表 7 GNSS信号失锁30 s有无LSTM辅助组合导航误差统计结果
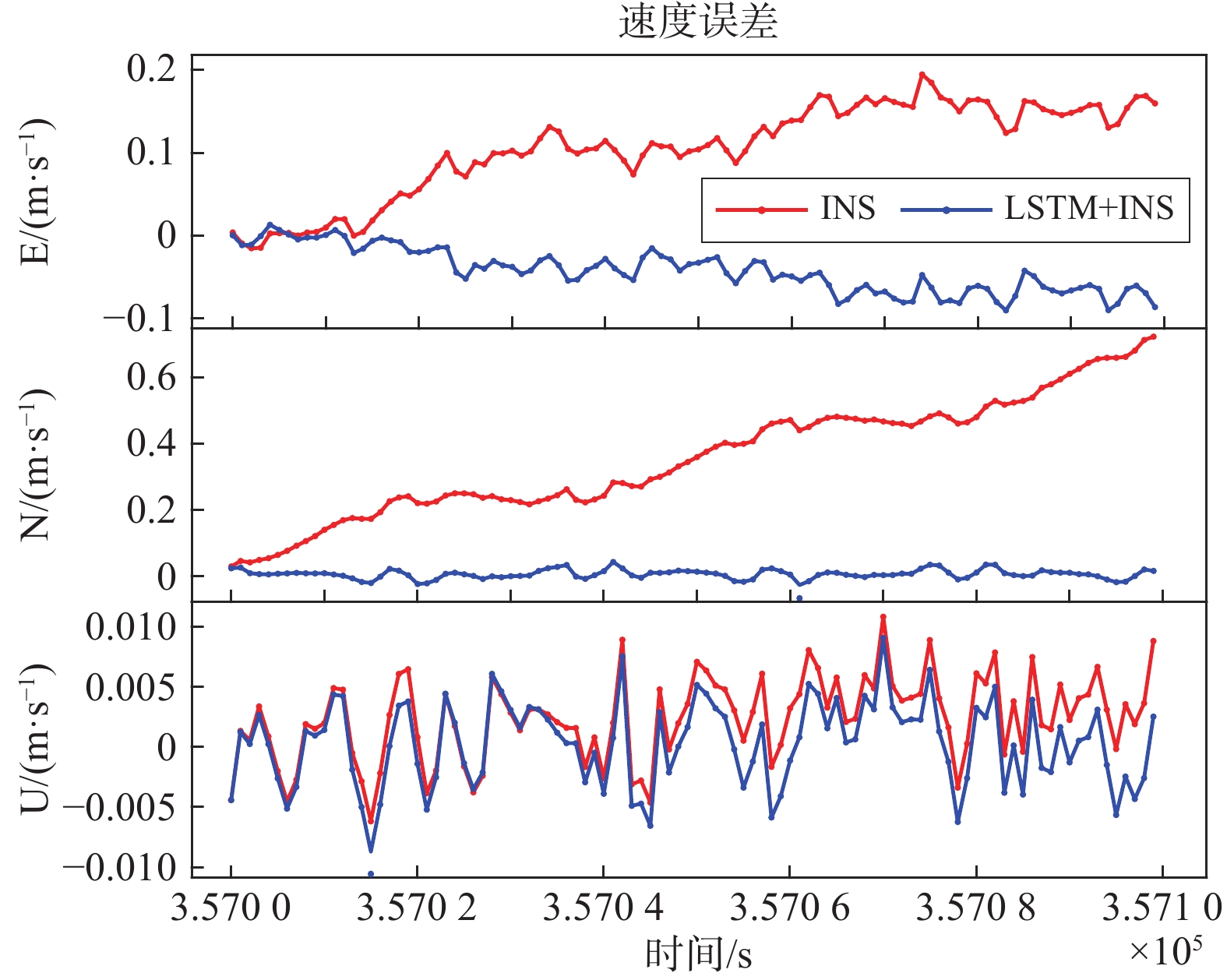
方法 位置误差/m 速度误差/(m·s−1) 姿态误差/(°) E N U E N U 俯仰 横滚 航向 INS 最大值 3.894 1.443 0.022 0.268 0.089 0.006 0.147 0.116 0.807 RMSE 1.803 0.845 0.013 0.155 0.055 0.003 0.072 0.061 0.788 LSTM+INS 最大值 0.878 1.192 0.029 0.085 0.120 0.006 0.115 0.111 0.862 RMSE 0.369 0.487 0.016 0.039 0.052 0.003 0.077 0.055 0.817
下载: 导出CSV
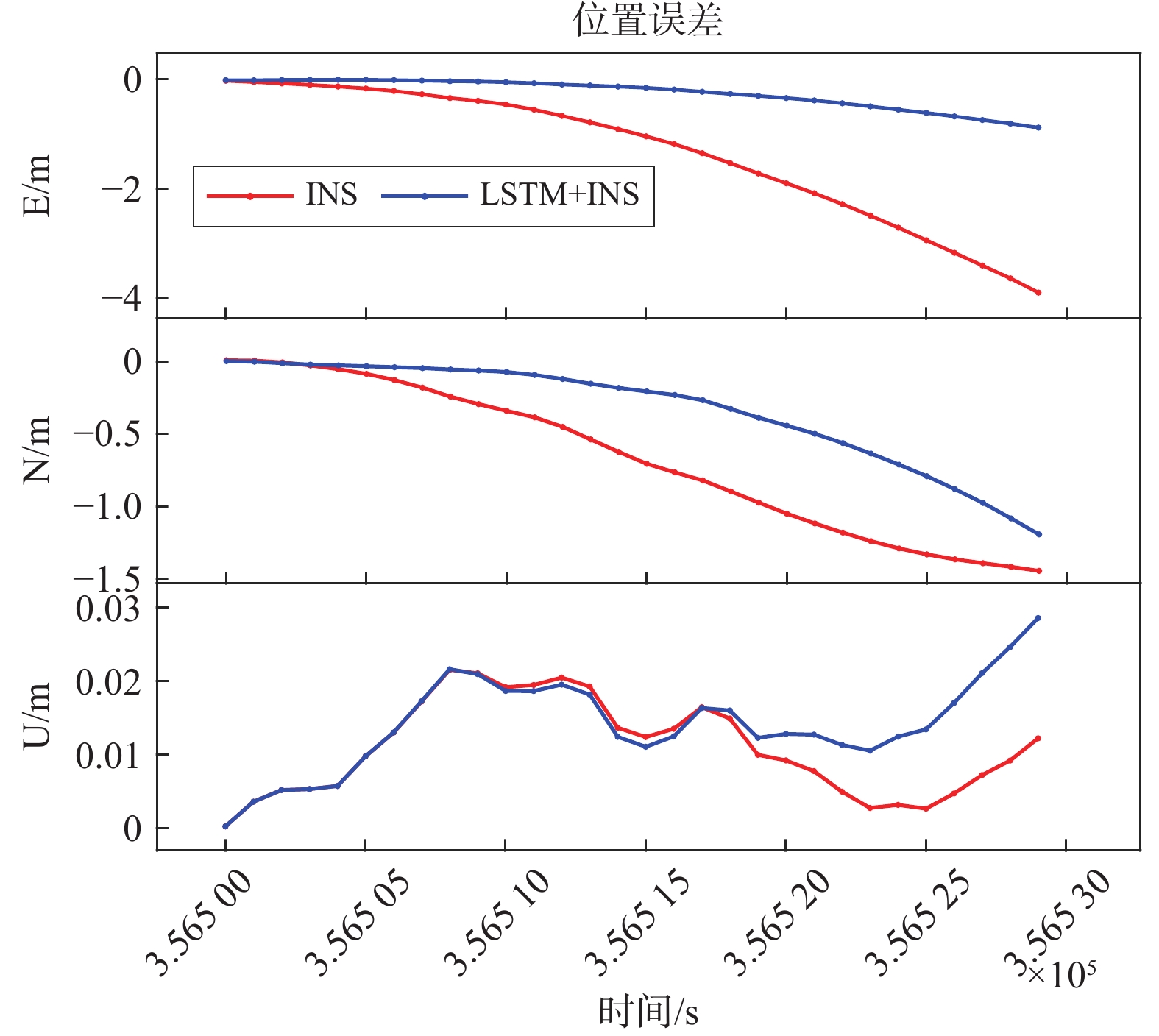
表 8 GNSS信号失锁100 s各时间段有无LSTM辅助组合导航位置误差对比
失锁时长/s INS位置误差/m LSTM+INS误差/m E N U 水平 E N U 水平 5 −0.025 0.182 −0.012 0.184 0.002 0.004 −0.013 0.006 10 −0.009 0.611 −0.016 0.611 −0.012 0.010 −0.021 0.016 15 0.040 1.402 −0.002 1.403 0.045 0.003 −0.011 0.045 20 0.220 2.456 −0.001 2.466 −0.114 0.038 −0.023 0.120 30 1.030 4.841 −0.001 4.950 −0.390 0.107 −0.026 0.404 45 2.600 8.483 0.025 8.873 −0.924 0.216 −0.013 0.949 60 4.232 14.096 0.068 14.718 −1.534 0.314 −0.010 1.566 100 10.470 35.396 0.228 36.912 −4.182 0.600 0.023 4.225
下载: 导出CSV
表 9 GNSS信号失锁100 s时有无LSTM辅助组合导航误差统计结果
方法 位置误差/m 速度误差/(m·s−1) 姿态误差/(°) E N U E N U 俯仰 横滚 航向 INS 最大值 10.470 35.396 0.228 0.195 0.724 0.011 0.069 0.121 0.086 RMSE 5.089 16.622 0.103 0.119 0.398 0.004 0.037 0.056 0.822 LSTM+INS 最大值 4.181 0.600 0.035 0.090 0.044 0.009 0.075 0.024 0.907 RMSE 1.936 0.336 0.021 0.050 0.015 0.003 0.026 0.062 0.822
下载: 导出CSV
-
[1] CHEN K, CHANG G, CHEN C. GINav: a MATLAB-based software for the data processing and analysis of a GNSS/INS integrated navigation system[J]. GPS solutions, 2021, 25(3): 1-7. DOI: 10.1007/s10291-021-01144-9 [2] BITAR N A, GAVRILOV A, KHALAF W. Artificial intelligence based methods for accuracy improvement of integrated navigation systems during GNSS signal outages: an analytical overview[J]. Gyroscopy and navigation, 2020, 11(1): 41-58. DOI: 10.1134/S2075108720010022 [3] EL-SHEIMY N, CHIANG K W, NOURELDIN A. The utilization of artificial neural networks for multisensor system integration in navigation and positioning instruments[J]. IEEE transactions on instrumentation and measurement, 2006, 55(5): 1606-1615. DOI: 10.1109/TIM.2006.881033 [4] SHARAF R, NOURELDIN A. Sensor integration for satellite-based vehicular navigation using neural networks[J]. IEEE transactions on neural networks, 2007, 18(2): 589-594. DOI: 10.1109/TNN.2006.890811 [5] 鲍泳林, 李皓, 袁鸣, 等. 基于神经网络的INS/GPS组合导航误差补偿研究[J]. 弹箭与制导学报, 2019, 39(2): 55-59. [6] 赵乐宁, 李杰, 冯凯强, 等. GPS失锁时的RBF神经网络辅助组合导航算法[J]. 航天控制, 2022, 40(3): 37-43. [7] 王超, 周军, 黄浩乾, 等. BP神经网络辅助的SINS/GPS组合导航姿态误差补偿方法研究[J]. 电子器件, 2021, 44(4): 987-993. DOI: 10.3969/j.issn.1005-9490.2021.04.041 [8] XU Y, WANG K, JIANG C H, et al. Motion-Constrained GNSS/INS integrated navigation method based on BP neural network[J]. Remote sensing, 2023, 15(1): 154. DOI: 10.3390/rs15010154 [9] 闫世霖, 吴德伟, 王伟, 等. 循环神经网络辅助GNSS/SINS组合导航方法及性能分析[J]. 空军工程大学学报(自然科学版), 2021, 22(5): 61-66,81. [10] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. [11] 陈凯. GNSS/INS组合导航软件开发[D]. 徐州: 中国矿业大学, 2022. [12] 严恭敏, 李梓阳, 朱宏堡. 基于Allan方差分析的陀螺仪漂移误差辨识与仿真复现[J]. 导航定位学报, 2022, 10(4): 29-33. -




 点击查看大图
点击查看大图
图(18) / 表(9)
计量
- 文章访问数: 240
- HTML全文浏览量: 80
- PDF下载量: 39
- 被引次数: 0
