

Assessment of antenna array-aided RTK positioning with different cut-off elevation angles
-
摘要: 针对天线阵列实时动态(RTK)的定位性能评估问题,将天线阵列RTK的数学模型与RTK的数学模型进行对比分析,并在不同截止高度角下采用天线阵列RTK与RTK对一组静态实测数据进行单历元解算. 结果表明:相较于RTK,天线阵列RTK能够增加双差观测方程的冗余度从而增加模型强度,达到提高模糊度固定成功率与定位精度的效果. 基于GPS+北斗卫星导航系统(BDS)组合的天线阵列RTK在50°大截止高度角下,其模糊度固定成功率达到93.6%,并且固定解水平精度优于1 cm、高程精度优于2 cm,能够满足高精度定位需求,进一步提高了RTK在城市峡谷等环境中的适用性.Abstract: To evaluate the positioning performance of antenna array-aided real time kinematic (RTK), the mathematical model of antenna array-aided RTK is compared with the mathematical model of RTK firstly, and then a set of static measurement is processed with antenna array-aided RTK and RTK at different cut-off elevation angles. It is demonstrated that the strength of RTK is enhanced by increasing the redundancy of the double-difference observation equation from antenna array, which can improve the success rate of ambiguity resolution and positioning accuracy. Based on the combination of GPS and BDS, the antenna array-aided RTK achieves 93.6% ambiguity resolution success rate at a large cut-off elevation angle of 50°. Moreover, the horizontal accuracy of the fixed solution is better than 1 cm and the height accuracy is better than 2 cm, which can fulfill the demand of high-precision positioning and improve the applicability of RTK in urban canyon environment.
-
表 1 天线阵列RTK模型与RTK模型参数浮点解公式
模型 基线向量 模糊度向量 基线方差阵 模糊度方差阵 RTK模型 ${ {\boldsymbol{Q} }_{ {\boldsymbol{\hat b\hat b} } } }{ {\boldsymbol{G} }^{\rm{T}}}{\boldsymbol{Q} }_{\boldsymbol{p}}^{ - 1}{\boldsymbol{p} }$ ${ {\boldsymbol{\varLambda} } ^{ - 1} }\left( { {\boldsymbol{\phi} } - {\boldsymbol{G} }\hat {\boldsymbol{b} } } \right)$ ${\left( { { {\boldsymbol{G} }^{\rm{T}}}{\boldsymbol{Q} }_{\boldsymbol{p}}^{ - 1}{\boldsymbol{G} } } \right)^{ - 1} }$ ${ {\boldsymbol{\varLambda} }^{ - 1} }\left( { { {\boldsymbol{Q} }_{\boldsymbol{\phi}} }{ { + } }{\boldsymbol{G} }{ {\boldsymbol{Q} }_{{\boldsymbol{\hat b\hat b}}} }{ {\boldsymbol{G} }^{\rm{T}}} } \right){ {\boldsymbol{\varLambda} } ^{ - 1} }$ 天线阵列RTK模型 ${ {\boldsymbol{Q} }_{{\boldsymbol{\hat b\hat b}}} }{\bar {\boldsymbol{G} } ^{\rm{T}}}{\boldsymbol{Q} }_{\boldsymbol{P}}^{ - 1}{\boldsymbol{P} }$ ${ {\boldsymbol{Q} }_{{\boldsymbol{\hat a\hat a}}} }{\bar {\boldsymbol{\varLambda} } ^{\rm{T}}}{\left( { { {\boldsymbol{Q} }_{\boldsymbol{\varPhi}} } + \bar {\boldsymbol{G} } { {\boldsymbol{Q} }_{{\boldsymbol{\hat b\hat b}}} }{ {\bar {\boldsymbol{G} } }^{\rm{T}}} } \right)^{ - 1} }\left( { {\boldsymbol{\varPhi} } - \bar {\boldsymbol{G} } \hat {\boldsymbol{b} } } \right)$ ${\left( { { {\bar {\boldsymbol{G} } }^{\rm{T}}}{\boldsymbol{Q} }_{\boldsymbol{P}}^{ - 1}\bar {\boldsymbol{G} } } \right)^{ - 1} }$ ${\left( { { {\bar {\boldsymbol{\varLambda} } }^{\rm{T}}}{ {\left( { { {\boldsymbol{Q} }_{\boldsymbol{\varPhi}} }{ { + } }\bar {\boldsymbol{G} } { {\boldsymbol{Q} }_{{\boldsymbol{\hat b\hat b}}} }{ {\bar {\boldsymbol{G} } }^{\rm{T}}} } \right)}^{ { { - } }1} }\bar {\boldsymbol{\varLambda} } } \right)^{ { { - } }1} }$  下载: 导出CSV
下载: 导出CSV
表 2 不同截止高度角下各卫星系统的解算率
% 高度角/(°) GPS BDS GPS+BDS 20 100.0 100.0 100.0 25 96.7 100.0 100.0 30 93.3 100.0 100.0 35 83.7 100.0 100.0 40 64.4 98.6 100.0 45 37.7 85.3 100.0 50 17.6 78.5 99.1 55 - 12.5 47.0 60 - - 23.9
下载: 导出CSV
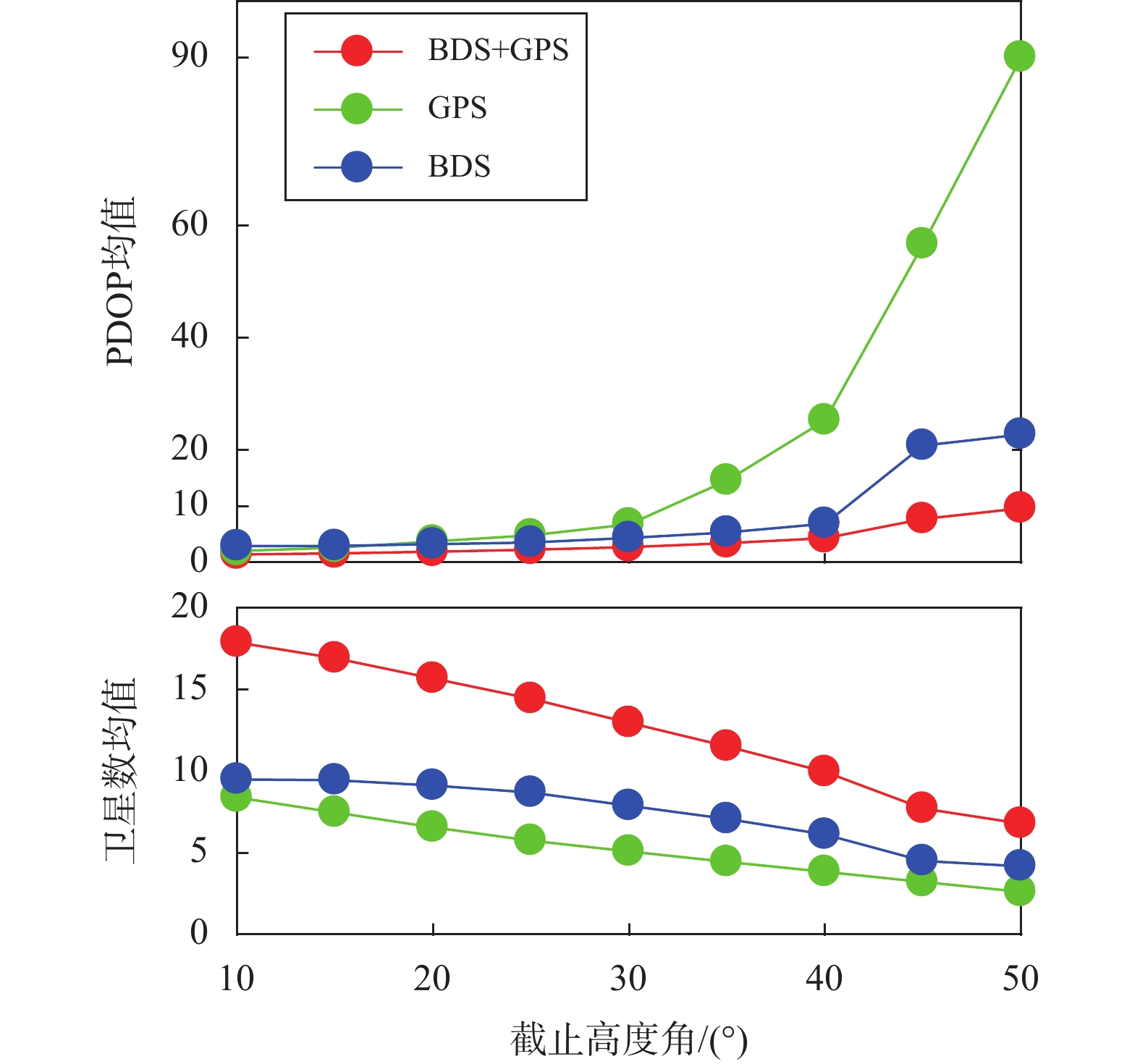
表 3 不同截止高度角下各卫星系统PDOP均值与可视卫星数均值
截止高度角/(°) 卫星数均值 PDOP均值 GPS BDS GPS+BDS GPS BDS GPS+BDS 10 8.4 9.5 17.9 2.0 2.8 1.4 20 6.6 9.1 15.7 3.7 3.2 1.9 30 5.1 7.9 13.0 6.8 4.3 2.7 40 3.8 6.1 10.0 25.3 6.9 4.3 50 2.6 4.2 6.8 89.9 22.8 9.6
下载: 导出CSV
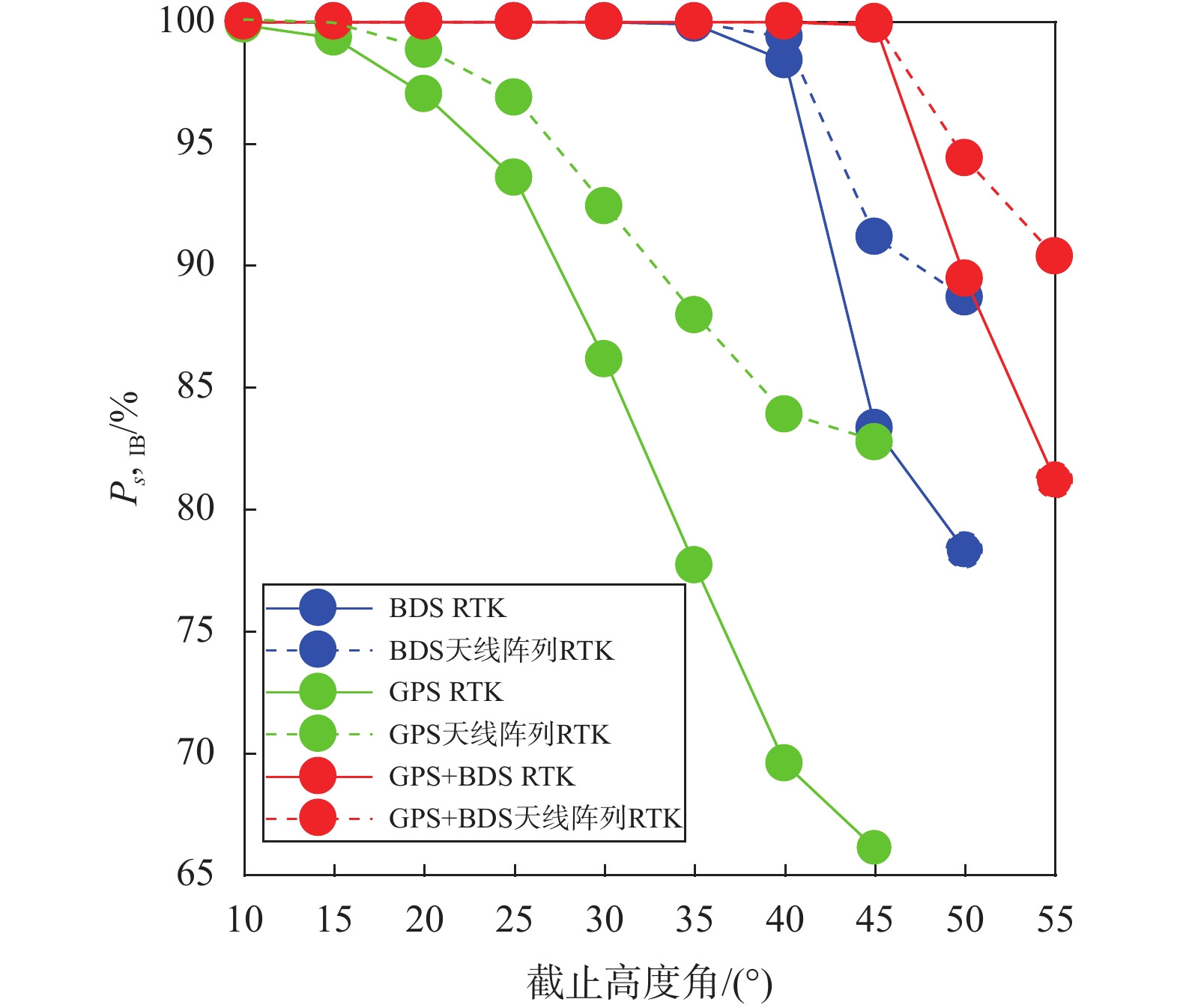
表 4 天线阵列RTK与RTK在不同截止高度角下的模糊度固定成功率
% 截止高
度角/(°)GPS BDS GPS+BDS RTK 天线阵
列RTKRTK 天线阵
列RTKRTK 天线阵
列RTK20 98.9 99.0 100 100 100 100 30 90.4 93.5 100 100 100 100 35 84.8 90.3 99.6 99.9 100 100 40 78.0 84.7 97.7 99.3 100 100 45 70.8 78.2 79.4 85.9 99.9 99.9 50 - - 77.7 85.7 89.6 93.6 55 - - - - 78.4 83.3
下载: 导出CSV
表 5 不同截止高度角下天线阵列RTK与RTK三维坐标RMSE
卫星系统 截止高度角/(°) 浮点解坐标RMSE/m 固定解坐标RMSE/cm RTK 天线阵列RTK RTK 天线阵列RTK GPS单系统 20 1.73 1.58 1.00 0.85 30 2.71 2.37 1.54 1.34 40 4.07 3.61 2.38 2.20 50 - - - - BDS单系统 20 1.31 0.99 0.89 0.73 30 1.70 1.24 1.13 0.98 40 2.85 2.17 1.55 1.38 50 5.13 4.19 3.36 3.14 GPS+BDS 20 0.85 0.69 0.56 0.47 30 1.11 0.88 0.70 0.61 40 1.76 1.39 1.02 0.90 50 2.70 2.26 2.17 2.02
下载: 导出CSV
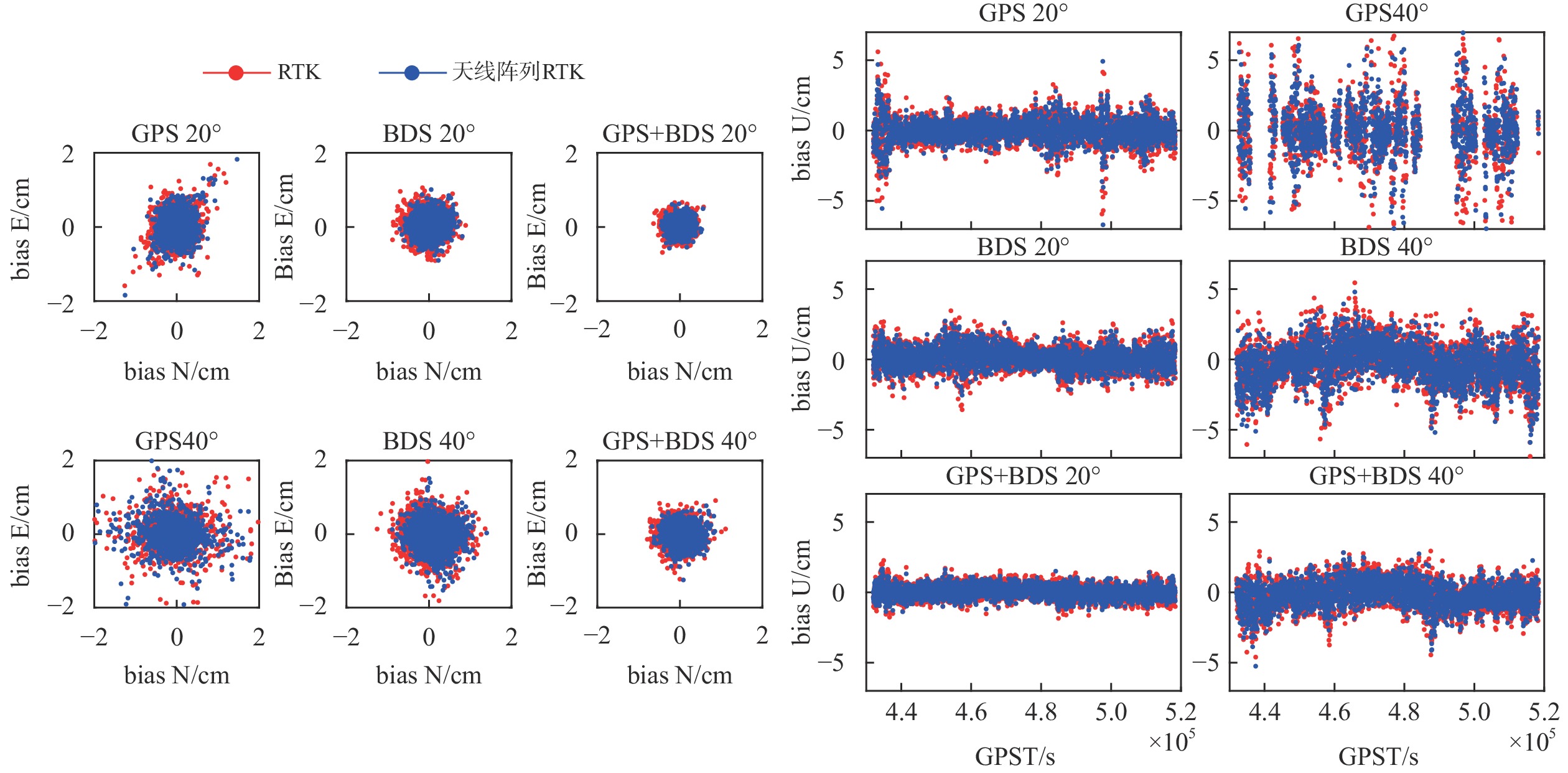
表 6 不同截止高度角下天线阵列RTK与RTK固定解E、N、U方向上的RMSE
卫星
系统截止高
度角/(°)RTK RMSE/cm 天线阵列RTK RMSE/cm E N U E N U GPS 20 0.25 0.30 0.93 0.22 0.26 0.78 30 0.43 0.38 1.43 0.39 0.34 1.24 40 0.56 0.48 2.27 0.54 0.44 2.09 50 - - - - - - BDS 20 0.25 0.26 0.82 0.20 0.22 0.67 30 0.27 0.29 1.05 0.23 0.25 0.93 40 0.33 0.35 1.47 0.28 0.30 1.32 50 0.76 0.73 3.19 0.68 0.68 2.99 GPS+BDS 20 0.16 0.17 0.50 0.14 0.15 0.42 30 0.18 0.19 0.65 0.16 0.16 0.56 40 0.23 0.22 0.96 0.20 0.19 0.85 50 0.52 0.34 2.08 0.48 0.30 1.94
下载: 导出CSV
-
[1] BRACK A. Reliable GPS + BDS RTK positioning with partial ambiguity resolution[J]. GPS solutions, 2017, 21(3): 1083-1092. DOI: 10.1007/s10291-016-0594-1 [2] TEUNISSEN P J G. The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation[J]. Journal of geodesy, 1995(70): 65-82. DOI: 10.1007/BF00863419 [3] ZHAO Q L, DAI Z Q, HU Z G, et al. Three-carrier ambiguity resolution using the modified TCAR method[J]. GPS solutions, 2015, 19(4): 589-599. DOI: 10.1007/s10291-014-0421-5 [4] KIM D, LANGLEY R B. An optimized least-squares technique for improving ambiguity resolution and computational efficiency[C]// Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999), 1999. [5] ODOLINSKI R, TEUNISSEN P J G. Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: a low-cost and high-grade receivers GPS-BDS RTK analysis[J]. Journal of geodesy, 2016, 90(11): 1255-1278. DOI: 10.1007/s00190-016-0921-x [6] LI B F, TEUNISSEN P J G. GNSS antenna array-aided CORS ambiguity resolution[J]. Journal of geodesy, 2014, 88(4): 363-376. DOI: 10.1007/s00190-013-0688-2 [7] 高猛, 徐爱功, 祝会忠, 等. BDS网络RTK参考站三频整周模糊度解算方法[J]. 测绘学报, 2017, 46(4): 442-452. [8] 何俊, 刘万科, 张小红. 北斗短基线三频实测数据单历元模糊度固定[J]. 武汉大学学报(信息科学版), 2015, 40(3): 361-365. [9] 张小红, 柳根, 郭斐, 等. 北斗三频精密单点定位模型比较及定位性能分析[J]. 武汉大学学报(信息科学版), 2018, 43(12): 2124-2130. [10] 卜宇航, 李博峰, 臧楠, 等. BDS/Galileo/GPS三频精密单点定位模型比较与分析[J]. 导航定位学报, 2021, 9(1): 78-87,121. [11] 金双根, 汪奇生, 史奇奇. 单频到五频多系统GNSS精密单点定位参数估计与应用[J]. 测绘学报, 2022, 51(7): 1239-1248. [12] 罗虹, 赵政权. 高度角对GNSS多系统组合短基线RTK影响[J]. 导航定位学报, 2022, 10(4): 145-152. [13] 管庆林, 樊春明, 王俊杰. 亚太地区BDS-3/GNSS组合系统单频单点定位性能分析[J]. 全球定位系统, 2022, 47(6): 102-108. [14] TEUNISSEN P J G. The affine constrained GNSS attitude model and its multivariate integer least-squares solution[J]. Journal of geodesy, 2012, 86(7): 547-563. DOI: 10.1007/s00190-011-0538-z [15] MA L Y, ZHU F, LIU W K, et al. VC-LAMBDA: a baseline vector constrained LAMBDA method for integer least-squares estimation[J]. Journal of geodesy, 2022, 96(9): 59. DOI: 10.1007/s00190-022-01644-7 [16] MA L Y, LU L G, ZHU F, et al. Baseline length constraint approaches for enhancing GNSS ambiguity resolution: comparative study[J]. GPS solutions, 2021, 25(2): 40. DOI: 10.1007/s10291-020-01071-1 [17] LI H, GAO S, LI L, et al. Real time precise relative positioning with moving multiple reference receivers[J]. Sensors, 2018, 18(7): 2109. DOI: 10.3390/s18072109 [18] TEUNISSEN P J G. A-PPP: array-aided precise point positioning with global navigation satellite systems[J]. IEEE transactions on signal processing, 2012, 60(6): 2870-2881. DOI: 10.1109/TSP.2012.2189854 [19] WU S S, ZHAO X B, ZHANG L, et al. Improving reliability and efficiency of RTK ambiguity resolution with reference antenna array: BDS+GPS analysis and test[J]. Journal of geodesy, 2019, 93(3): 1297-1311. DOI: 10.1007/s00190-019-01246-w -


 点击查看大图
点击查看大图
图(6) / 表(6)
计量
- 文章访问数: 140
- HTML全文浏览量: 68
- PDF下载量: 28
- 被引次数: 0
