

LEO enhanced Beidou PPP-RTK positioning method and experimental analysis
-
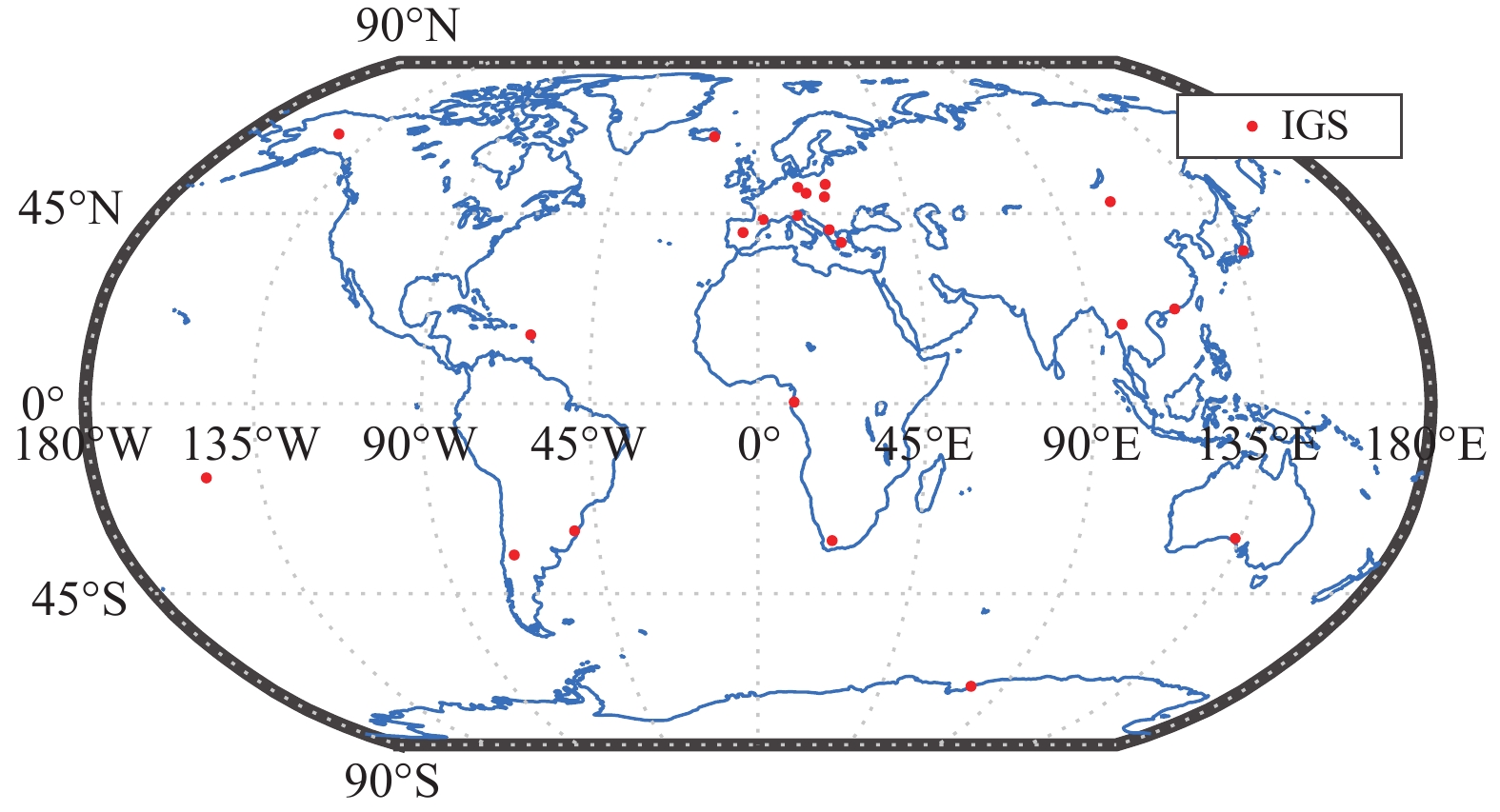
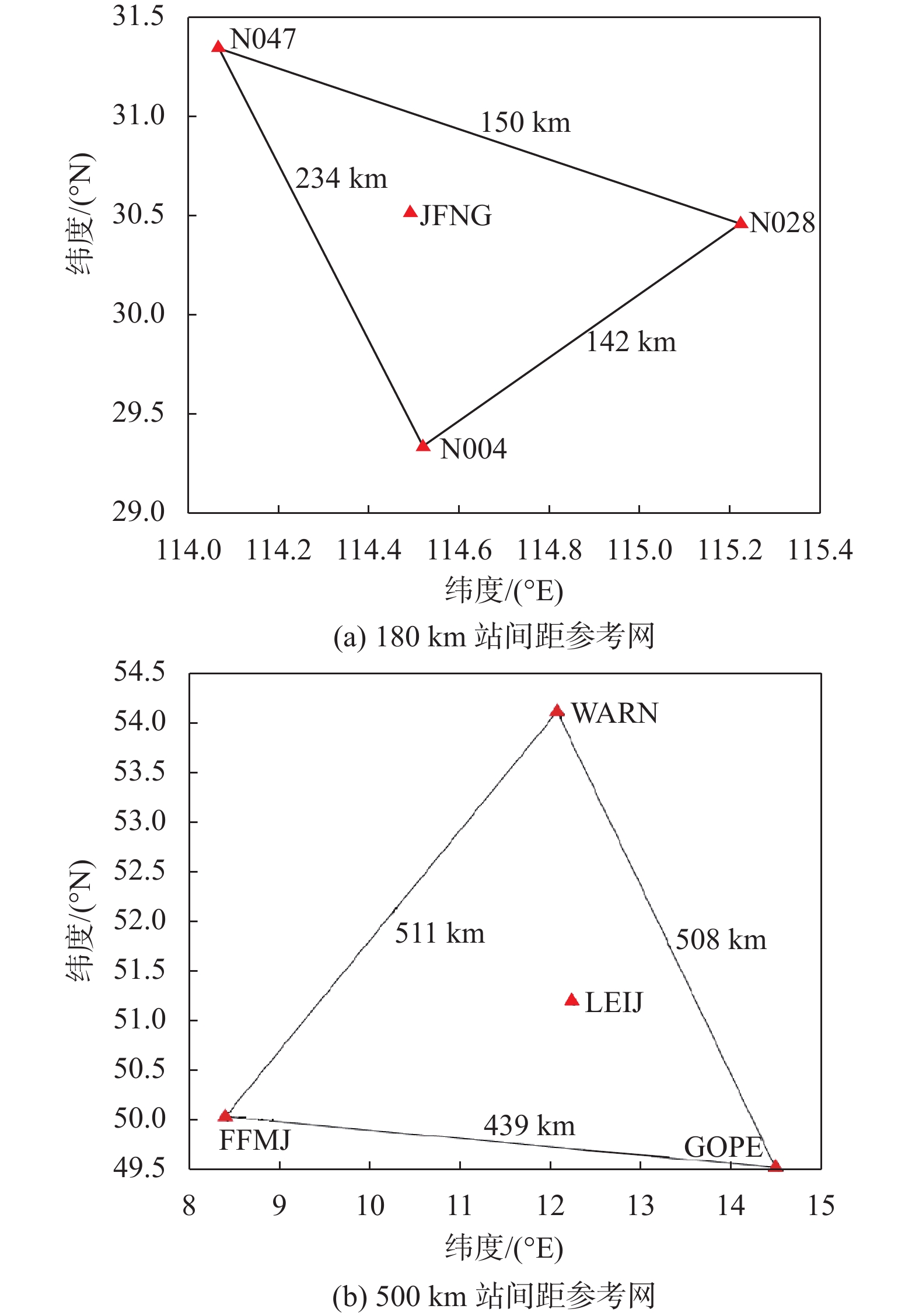
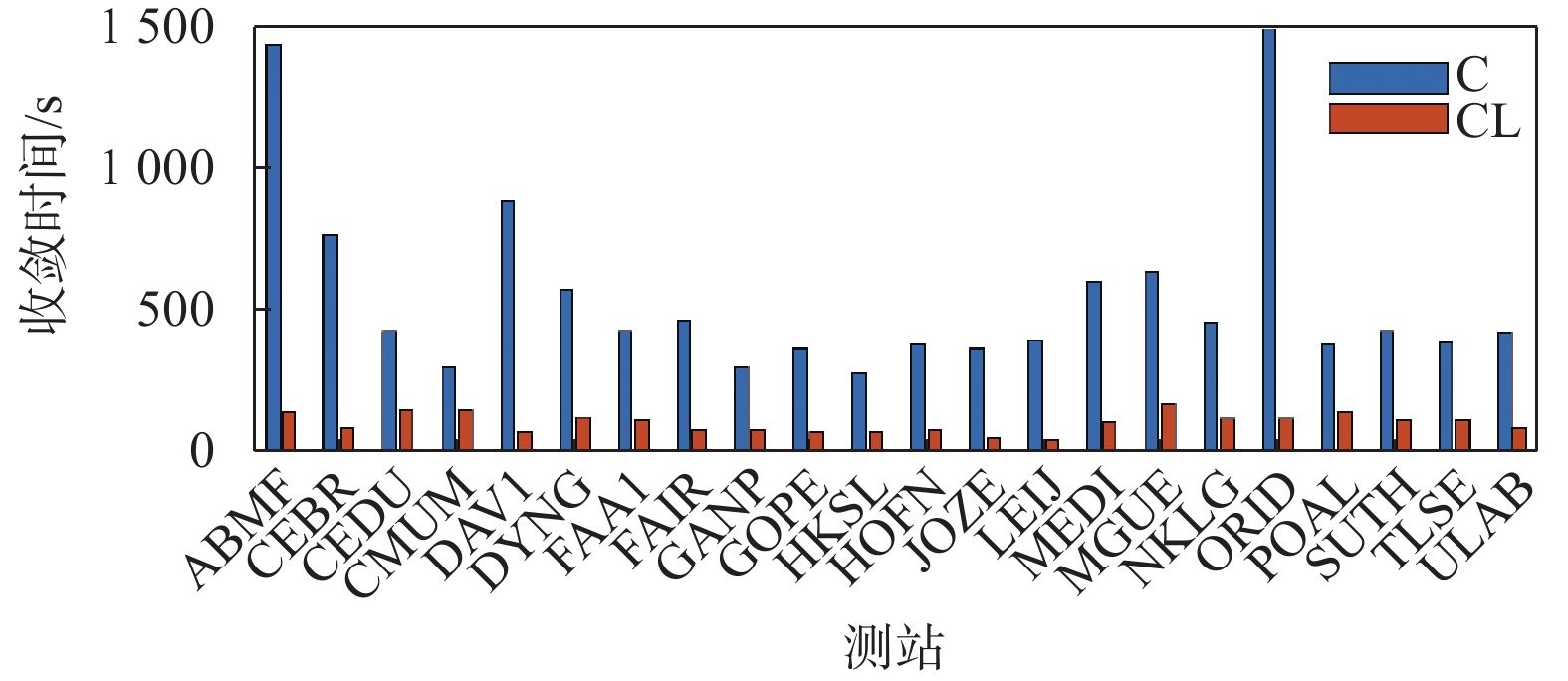
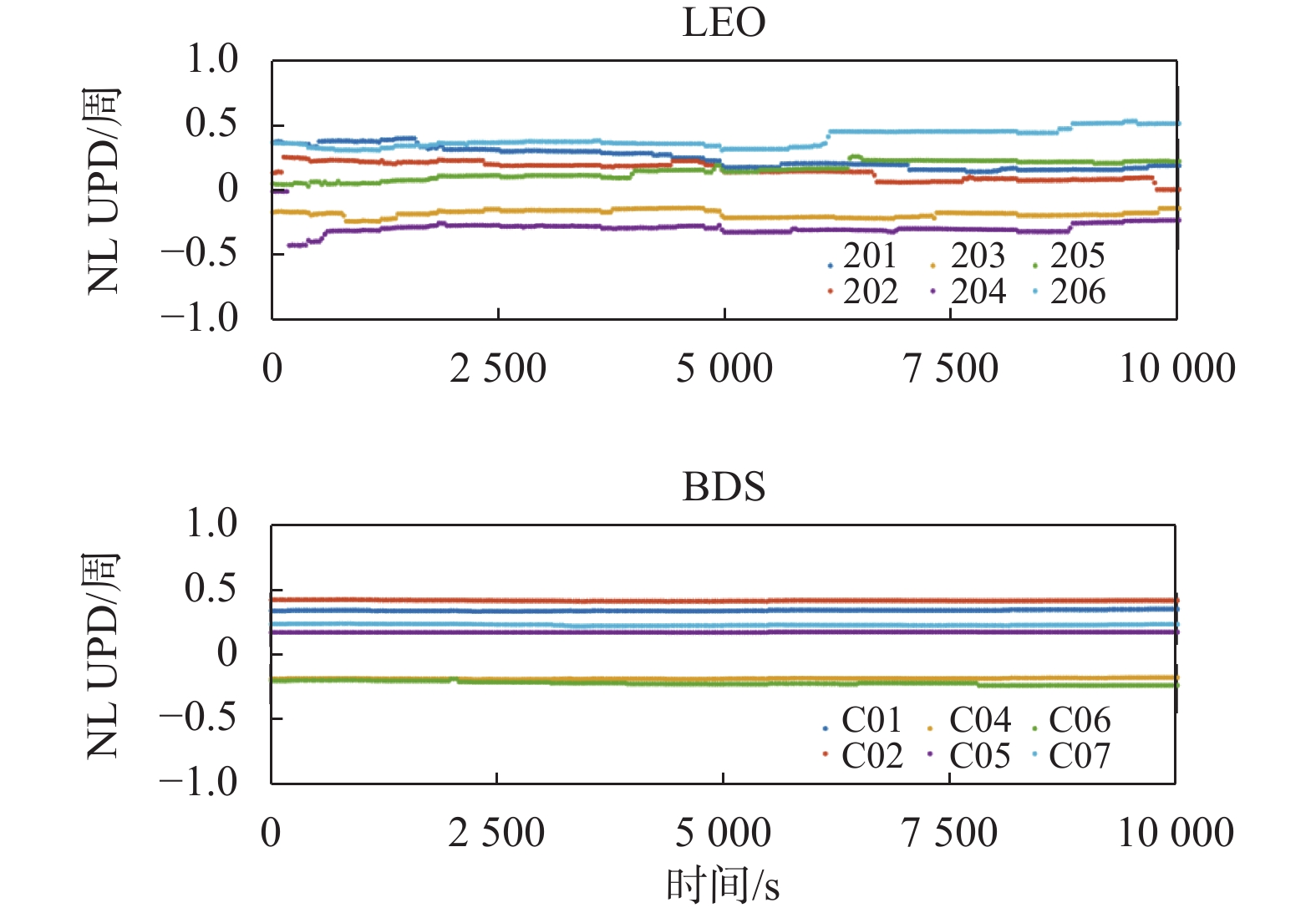
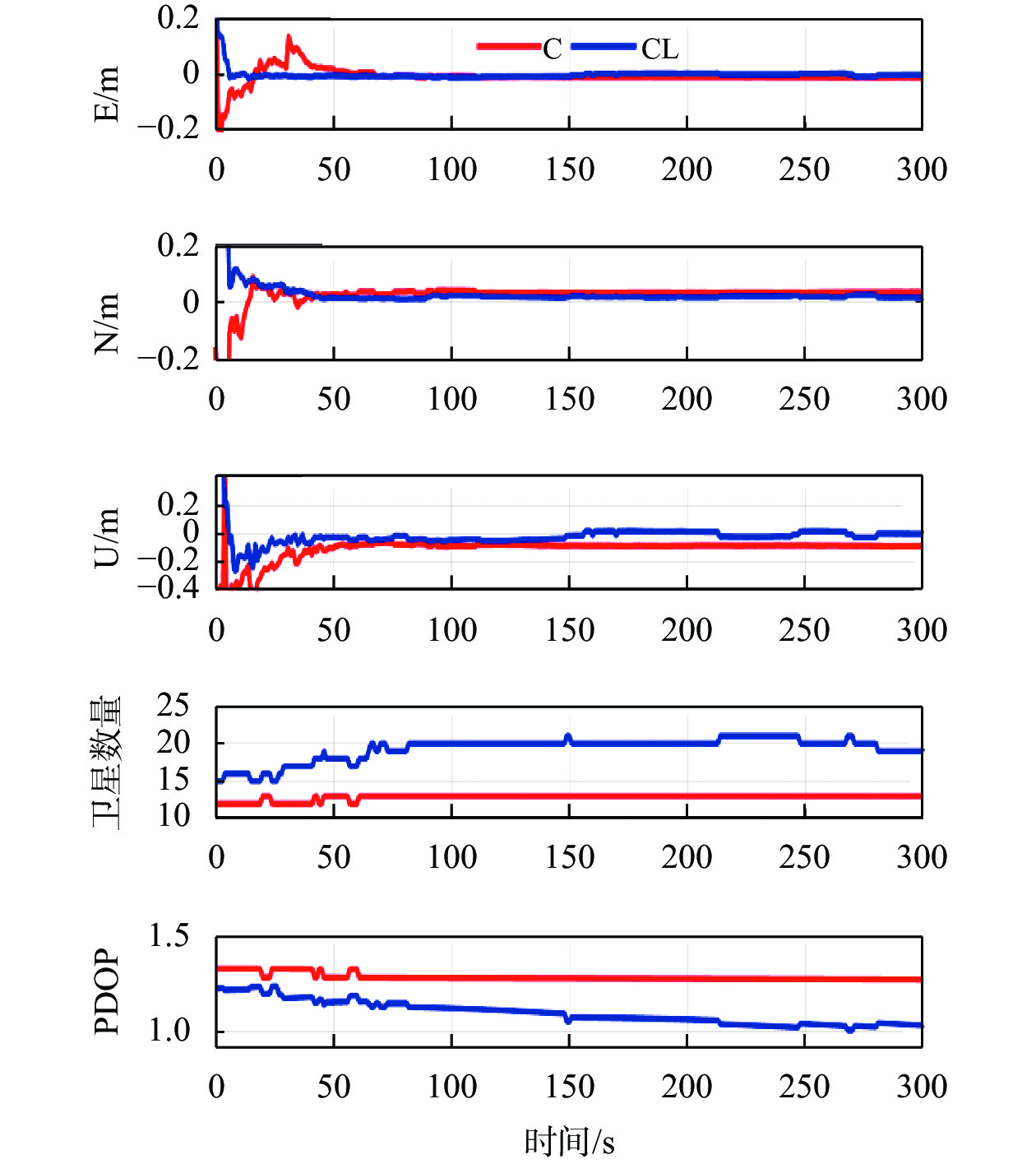
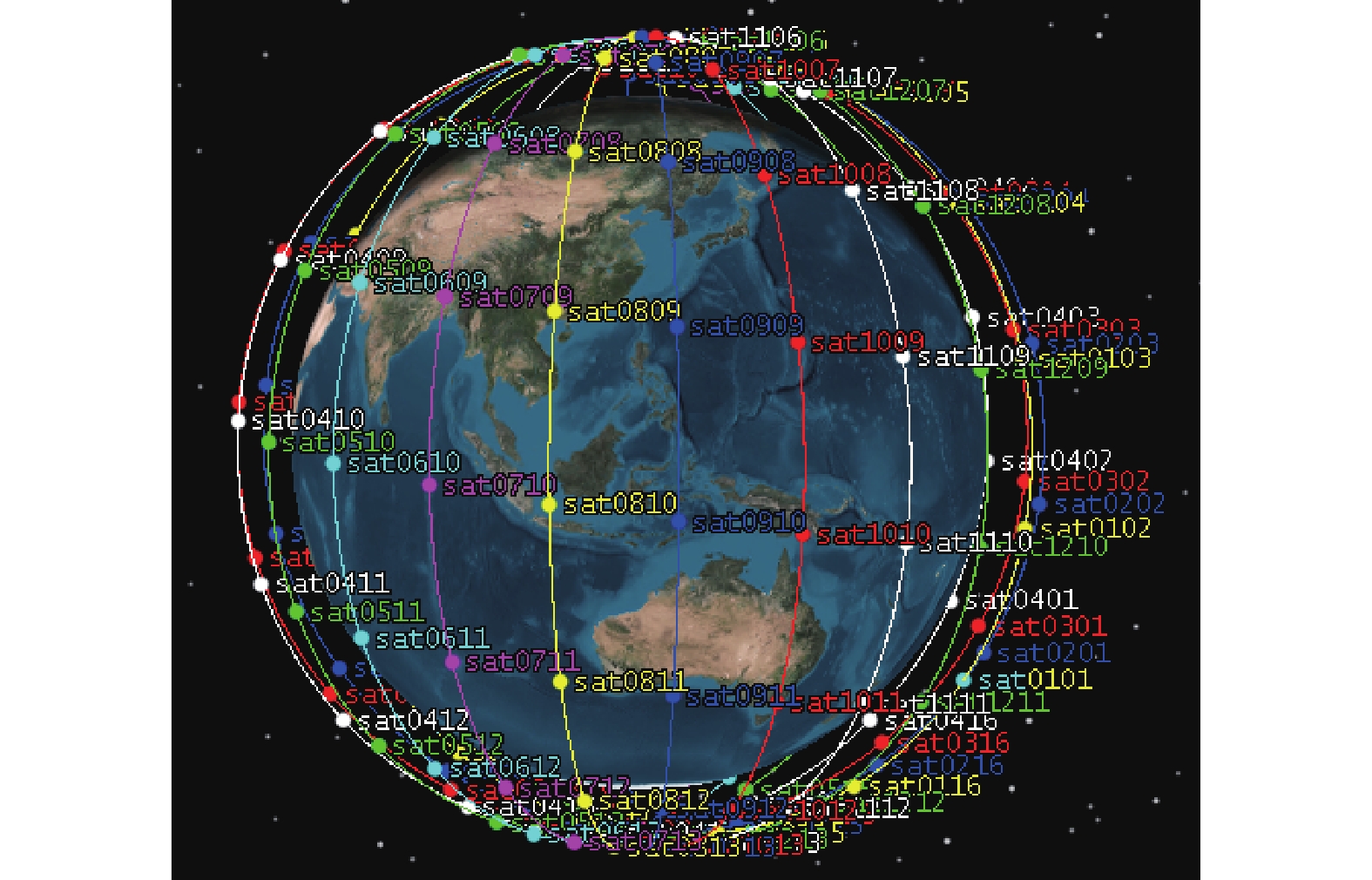
摘要: 低轨星座具有卫星数目多、几何构型变化快等优势,有利于精密单点定位(PPP)中模糊度参数的快速收敛,从而提升其收敛速度与定位精度. 但由于未能精确消除大气误差的影响,难以实现瞬时厘米级定位. 提出一种低轨增强北斗PPP-实时动态(RTK)方法,结合高精度大气增强信息与模糊度固定方法(AR),进一步改进北斗快速精密定位性能. 首先设计了包含192颗低轨卫星的极轨星座,仿真了22个地面测站的观测数据,在估计相位小数偏差与精密大气延迟改正数后,分别测试了低轨增强北斗PPP、PPP-AR与PPP-RTK的定位性能. 结果表明:在低轨星座增强下,可视卫星数目增加6~8颗,22个测站北斗PPP的平均初始化时间由552.1 s缩短至102 s, 提升了81.52%. 模糊度固定后,初始化时间进一步缩短至1 min以内. 通过180 km地面参考网增强后,低轨增强北斗PPP-RTK可以实现瞬时厘米级定位,定位精度相较于PPP提升98.5%. 将地面参考网扩大至500 km后,低轨增强北斗PPP-RTK仍可以实现约10 s的快速收敛.
-
关键词:
- 低轨增强 /
- 精密单点定位(PPP)-实时动态(RTK) /
- 相位小数偏差 /
- 模糊度固定 /
- 北斗卫星导航系统(BDS)
Abstract: Low earth orbit (LEO) constellation has the advantages of large number of satellites and rapid change of geometric configuration, which is conducive to the rapid convergence of ambiguity parameters in precise single point positioning (PPP). However, it is difficult to achieve rapid convergence of ambiguity in several seconds or even instantaneous because of the influence of atmospheric delay. In this contribution, a LEO constellation enhanced PPP-RTK method is proposed, which makes full use of the high-precision atmospheric information and ambiguity resolution (AR) method to further improve the positioning performance of Beidou. A polar orbit constellation containing 192 LEO satellites was designed, and the observations of 22 ground stations were simulated. After estimating the UPD and precision atmospheric delay correction, the positioning performance of LEO enhanced PPP, PPP-AR and PPP-RTK are evaluated respectively. The results show that under the enhancement of LEO constellation, the number of visible satellites increases by 4~6, and the average PPP initialization time of 22 stations is shortened from 552.1 s to 102 s, with the improvement of 81.52%. After the ambiguity resolution, the initialization time is further shortened to less than 1 minute. With the regional network augmentation, the LEO enhanced PPP-RTK can achieve a positioning accuracy of centimeter degree, and the positioning accuracy can be improved by 98.5% compared with PPP. Even when the ground reference network is expanded to 500 km, the LEO enhanced PPP-RTK can still achieve rapid convergence of about 10 seconds. -
表 1 低轨增强北斗PPP-RTK处理策略
类别 处理策略 卫星系统 LEO/BDS 估计器 序贯最小二乘 观测数据 仿真的非差伪距和载波相位观测值 信号 LEO: L1/L2 BDS: B1/B3 采用间隔 1 s 截止高度角 7° 卫星轨道 STK轨道 卫星钟差 仿真的精密卫星钟差 卫星天线 IGS天线改正产品 相对论效应 改正 电离层延迟 大气产品改正+残余误差WN估计 对流层延迟 大气产品改正+残余误差WN估计 接收机天线 IGS天线改正产品 地球潮汐 固体潮+极潮改正 接收机位置 静态估计 接收机钟差 WN估计 随机模型 经验的伪距载波噪声比(100∶1)及高度角定权  下载: 导出CSV
下载: 导出CSV
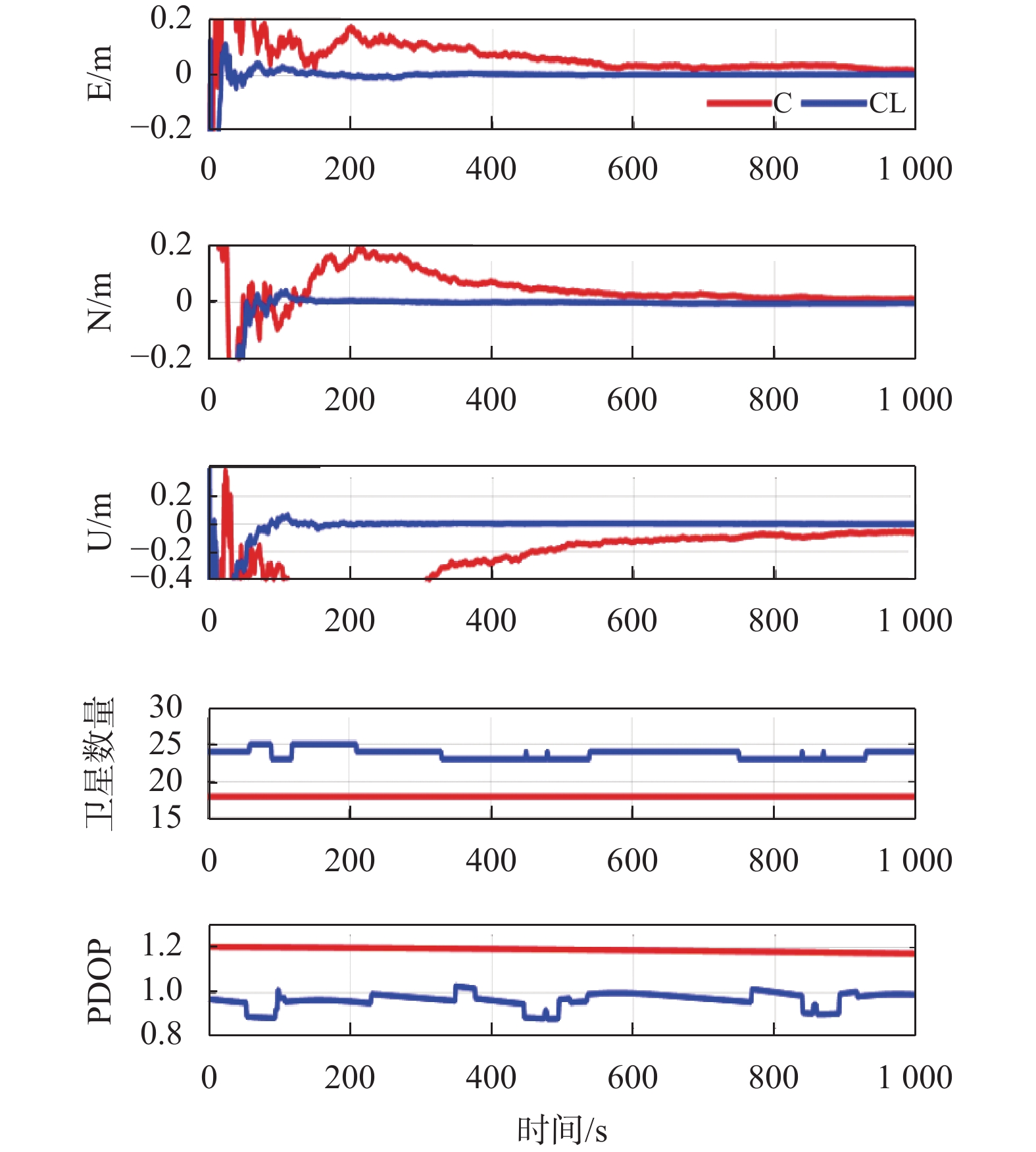
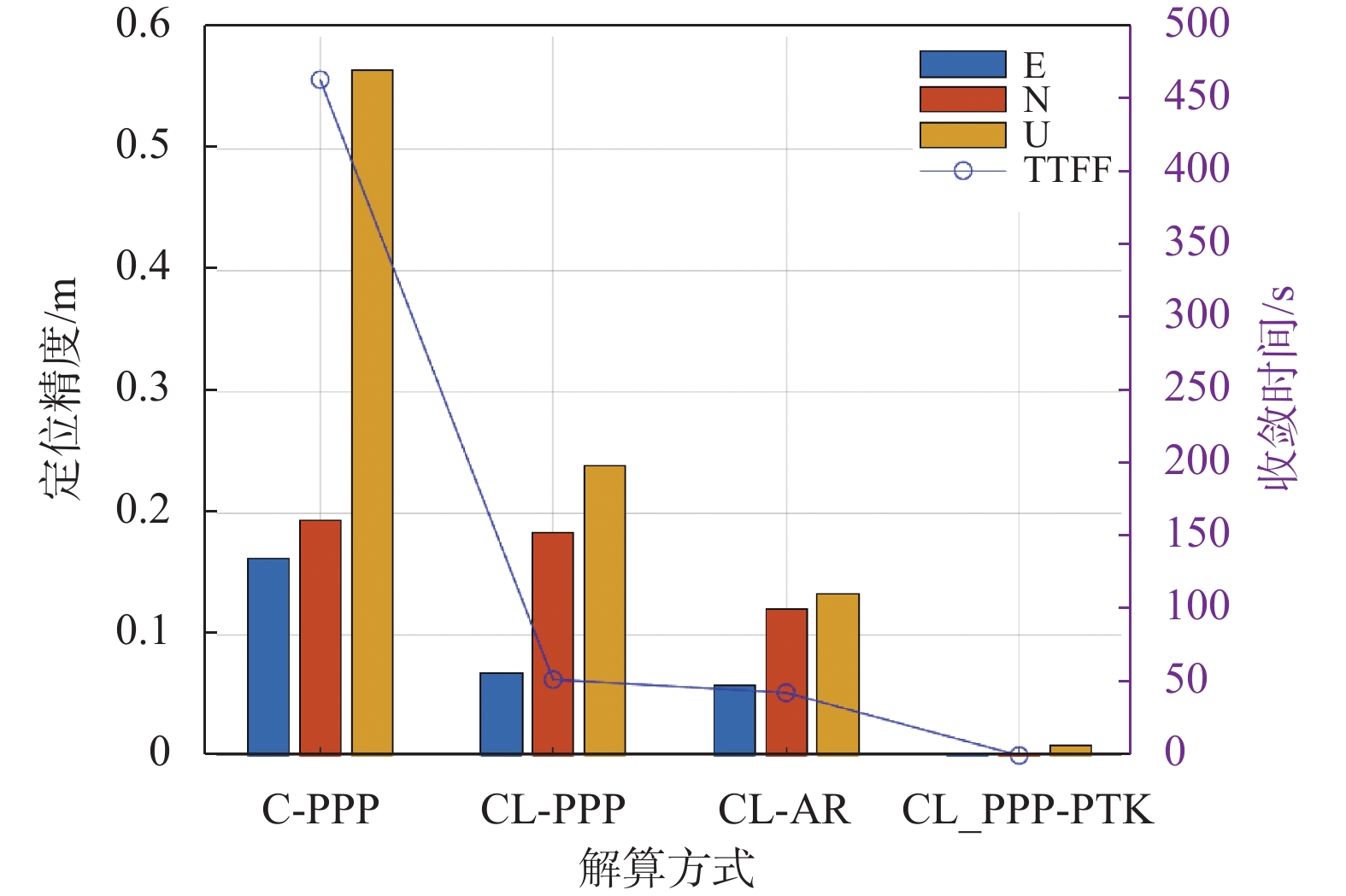
表 3 JFNG站下不同解算方式的结果
解算方式 收敛时间/s 定位精度/m E N U C_PPP 464 0.163 0.195 0.564 CL_PPP 53 0.070 0.184 0.240 CL_PPP-AR 44 0.059 0.122 0.134 CL_PPP-RTK 1 0.003 0.002 0.009
下载: 导出CSV
表 4 LEIJ站下不同结算方式的结果
解算方式 收敛时间/s 定位精度/m E N U C_PPP-RTK 33 0.041 0.028 0.136 CL_PPP-RTK 11 0.006 0.035 0.082
下载: 导出CSV
-
[1] ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of geophysical research atmospheres, 1997, 102(B3): 5005-5017. DOI: 10.1029/96JB03860 [2] KOUBA J, HEROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS solutions, 2001, 5(2): 12-28. DOI: 10.1007/PL00012883 [3] 马福建. 低轨星座增强GNSS精密定位关键技术研究[D]. 武汉: 武汉大学, 2018. [4] 张小红,胡家欢,任晓东. PPP/PPP-RTK 新进展与北斗/GNSS PPP定位性能比较[J]. 测绘学报, 2020, 49(9): 1084-1100. [5] GE H, LI B F, GE M R, et al. Initial assessment of precise point positioning with LEO enhanced global navigation satellite systems (LeGNSS)[J]. Remote sensing, 2018, 10(7): 984. DOI: 10.3390/rs10070984 [6] KE M X, LV J, CHANG J, et al. Integrating GPS and LEO to accelerate convergence time of precise point positioning[C]// 2015 International Conference on Wireless Communications & Signal Processing (WCSP), 2015. DOI: 10.1109/WCSP.2015.7341230 [7] 李昕. 多频率多星座GNSS快速精密定位关键技术研究[D]. 武汉: 武汉大学. [8] 彭文杰. 基于稀疏网的PPP-RTK理论与应用[D]. 武汉: 武汉大学, 2017. [9] WABBENA G, SCHMITZ M, BAGGE A. PPP-RTK: precise point positioning using state-space representation in RTK networks[C]//Proceedings of the 18th international technical meeting of the satellite division of the institute of navigation, 2005: 2584-2594. [10] TEUNISSEN P J G, ODIJK D, ZHANG B. PPP-RTK: results of CORS network-based PPP with integer ambiguity resolution[J]. Journal of aeronautics, astronautics and aviation, seriesA, 2010, 42(4): 223-230. [11] LI X X, ZHANG X H, GE M R. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution[J]. Journal of geodesy, 2010, 85(3): 151-158. DOI: 10.1007/s00190-010-0424-0 [12] 李星星. GNSS精密单点定位及非差模糊度快速确定方法研究[D]. 武汉: 武汉大学, 2013. [13] OLIVRIRA P S, MOREL L, FUND F, et al. Modeling tropospheric wet delays with dense and sparse network configurations for PPP-RTK[J]. GPS solutions, 2017, 21(1): 237-250. DOI: 10.1007/s10291-016-0518-0 [14] ZHANG B C, CHEN Y C, YUAN Y B. PPP-RTK based on undifferenced and uncombined observations: theoretical and practical aspects[J]. Journal of geodesy, 2019(93): 1011-1024. DOI: 10.1007/s00190-018-1220-5 [15] LI X X, HUANG J X, LI X, et al. Multi-constellation GNSS PPP instantaneous ambiguity resolution with precise atmospheric corrections augmentation[J]. GPS solutions, 2021, 25,(3): 107. DOI: 10.1007/s10291-021-01123-0 [16] LI X X, WANG B, Li X, et al. Principle and performance of multi-frequency and multi-GNSS PPP-RTK[J]. Satellite navigation, 2022, 3(1): 128-138. [17] LI X X, HAN X J, LI X, et al. GREAT-UPD: an open-source software for uncalibrated phase delay estimation based on multi-GNSS and multi-frequency observations[J]. GPS solutions, 2021, 25(2): 1. DOI: 10.1007/s10291-020-01070-2 [18] ZHANG X H, REN X D, CHEN J, et al. Investigating GNSS PPP-RTK with external ionospheric constraints[J]. Satellite navigation, 2022, 3(1). DOI: 10.1186/s43020-022-00067-1 -


 点击查看大图
点击查看大图
图(9) / 表(4)
计量
- 文章访问数: 403
- HTML全文浏览量: 164
- PDF下载量: 86
- 被引次数: 0
