

Refinement of GNSS stochastic model combining elevation angle and SNR and its effect on RTK positioning performance
-
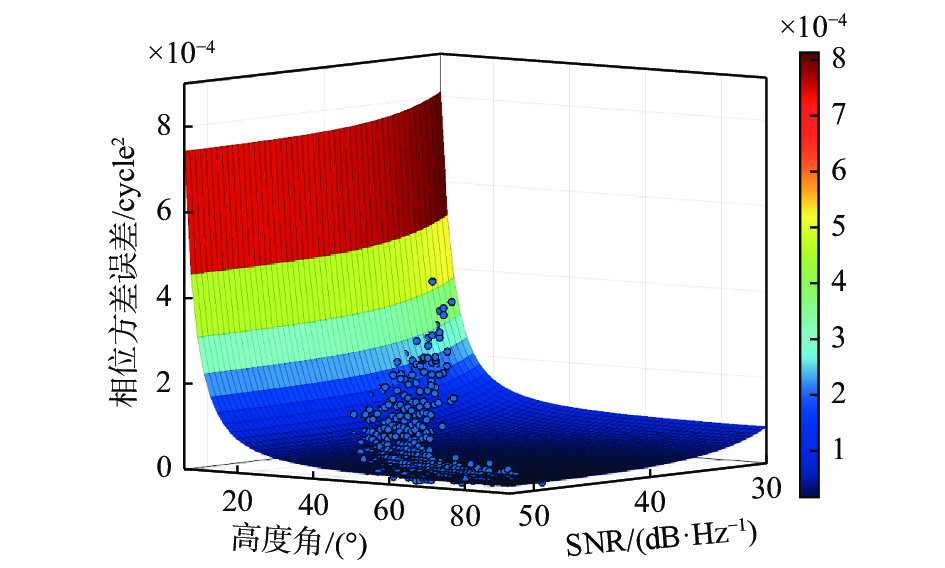
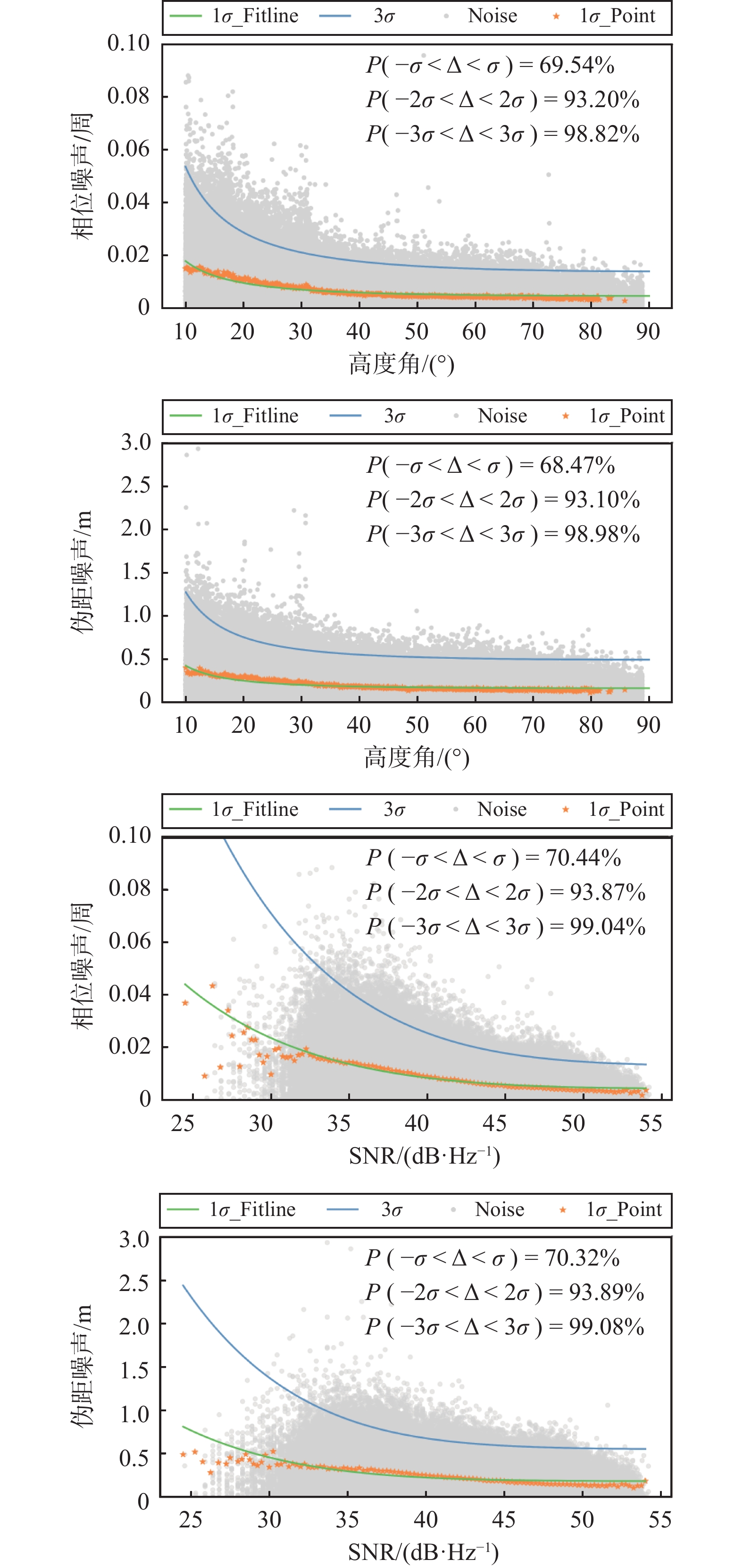
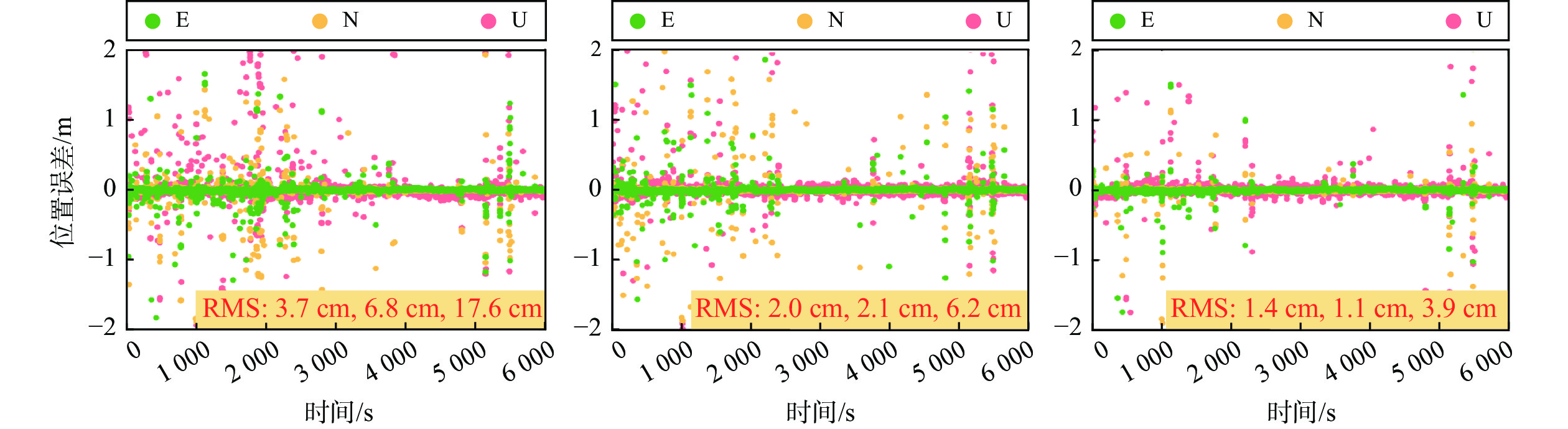
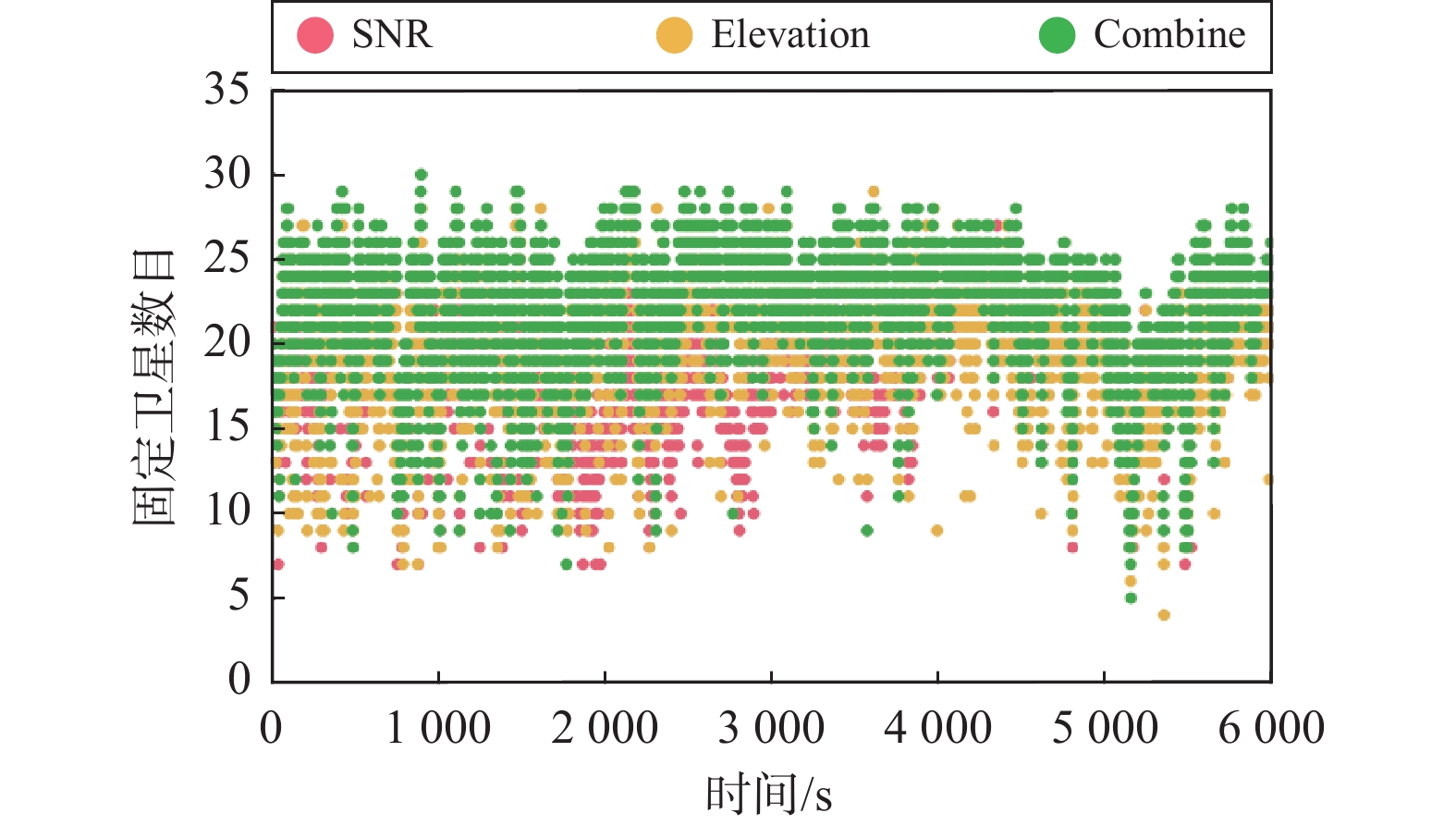
摘要: 全球卫星导航系统(GNSS)观测值精度会受到大气延迟、非视距(NLOS)信号和多径等因素的影响,而高度角或信噪比(SNR)模型对不同误差源的敏感程度不一样,导致传统基于高度角或SNR的单一随机模型不能满足全场景的高精度定位导航,加上多频多系统的出现,不同GNSS甚至同一系统的不同频段观测值精度也会存在差异,这也给传统模型定权带来了一定挑战. 在分析高度角随机模型、SNR随机模型存在的优缺点的基础上,提出了一种高度角、SNR混合的随机模型;通过站间单差、历元间三次差分别对GPS、北斗卫星导航系统(BDS)、Galileo的伪距、相位噪声进行提取,精化了高度角、SNR混合随机模型. 实验表明,SNR模型、高度角模型、混合模型的模糊度正确固定率分别为92.42%、95.85%、97.69%;SNR模型定位精度低于高度角和混合模型,混合模型相比于高度角模型,水平方向上定位精度提升了50.0%,高程方向精度提升了37.1%.
-
关键词:
- 多频多系统全球卫星导航系统(GNSS) /
- 噪声提取 /
- 随机模型 /
- 函数拟合 /
- 模糊度固定
Abstract: The accuracy of Global Satellite System Navigation (GNSS) observations will be affected by atmospheric delay, NLOS signal, multipath and other factors. However, the sensitivity of elevation angle or SNR model to different error sources is different. As a result, the traditional single random model based on elevation angle or signal noise ratio (SNR) cannot meet the high-precision positioning and navigation of the whole scene, coupled with the emergence of multi frequency and multi system, the accuracy of observations in different frequency bands of different GNSS systems and even the same system will also be different, which also brings a great challenge to the traditional model weighting. Based on the analysis of the advantages and disadvantages of elevation random model and SNR random model, a combined random model of elevation angle and SNR is proposed in this paper; The pseudo-range and phase noise of GPS, BDS, Galileo are extracted respectively through single difference between stations and cubic difference between epochs, and the combined random model of extracted and SNR is refined. Experiments show that the correct fixing rates of ambiguity of SNR model, elevation angle model and combined model are 92.42%, 95.85% and 97.69% respectively; Compared with the elevation angle model, the positioning accuracy of the combined model is improved by 50.0% in the horizontal direction and 37.1% in the elevation direction. -
表 1 高度角、SNR拟合参数
拟合
类型高度角模型 SNR模型 a b a b 伪距 1.49×10−1 6.91×10−2 3.36×10−2 1.77×10−2 相位 3.53×10−3 3.04×10−3 1.83×10−5 5.39×10−1  下载: 导出CSV
下载: 导出CSV
表 2 混合模型拟合参数及误差分布统计表
拟合
类型拟合参数 $p\left\{ { - k\sigma < \Delta < k\sigma } \right\}$/% ${w_{{\rm{EL}}}}$ $ {w_{{\rm{SNR}}}} $ $k = 1$ $k = 2$ $k = 1$ 伪距 0.64 0.39 69.84 93.87 99.16 相位 0.30 0.67 69.67 93.47 98.92
下载: 导出CSV
表 3 GPS/Galileo/BDS-2/BDS-3混合模型拟合参数及误差分布情况
卫星
系统频段 拟合
类型$p\left\{ { - 3\sigma < \Delta < 3\sigma } \right\}$/% 与高度角相关的参数 与SNR相关的参数 $ {w_{{\rm{EL}}}} $ ${a_{{\rm{EL}}}}$ ${b_{{\rm{EL}}}}$ $ {w_{{\rm{SNR}}}} $ ${a_{{\rm{SNR}}}}$ $ {b_{{\rm{SNR}}}} $ GPS L1 伪距 99.16 0.64 1.49×10−1 6.91×10−2 0.39 3.36×10−2 1.77×10−2 相位 98.92 0.30 3.53×10−3 3.04×10−3 0.67 1.83×10−5 5.39×10−1 L2 伪距 99.03 0.60 1.21×10−1 7.53×10−2 0.35 2.85×10−2 1.22×10−1 相位 99.27 0.44 8.62×10−4 3.31×10−3 0.68 2.40×10−5 2.28×10−2 Galileo E1 伪距 98.91 0.69 7.20×10−2 5.72×10−2 0.27 1.18×10−2 2.17×10−2 相位 98.84 0.72 3.46×10−3 2.11×10−3 0.25 2.43×10−5 2.67×10−1 E5a 伪距 98.90 0.40 5.89×10−2 5.59×10−2 0.56 2.89×10−3 2.96×10−2 相位 99.04 0.19 2.57×10−3 2.35×10−3 0.79 6.03×10−6 5.21×10−1 BDS-2 B1I 伪距 98.91 0.13 1.18×10−1 7.36×10−2 0.86 2.47×10−2 1.04×10−2 相位 99.07 0.17 4.82×10−3 3.10×10−3 0.85 1.91×10−5 4.44×10−1 B3I 伪距 99.61 0.26 5.89×10−2 4.78×10−2 0.99 2.32×10−3 9.29×10−1 相位 99.39 0.78 4.27×10−3 2.63×10−3 0.53 1.79×10−5 2.65×10−1 BDS-3 B1I 伪距 98.91 0.14 5.31×10−2 7.03×10−2 0.77 1.61×10−2 1.42×10−2 相位 99.43 0.55 2.64×10−3 2.55×10−3 0.42 2.07×10−5 4.61×10−1 B3I 伪距 99.21 0.27 4.65×10−2 4.78×10−2 0.73 6.22×10−3 1.38×10−2 相位 99.42 0.48 2.34×10−3 2.17×10−3 0.52 1.47×10−5 2.55×10−1
下载: 导出CSV
-
[1] 宁津生, 姚宜斌, 张小红. 全球导航卫星系统发展综述[J]. 导航定位学报, 2013(1): 3-8. DOI: 10.3969/j.issn.2095-4999.2013.01.002 [2] 张小红, 马福建. 低轨导航增强GNSS发展综述[J]. 测绘学报, 2019, 48(9): 1073-1087. DOI: 10.11947/j.AGCS.2019.20190176 [3] 李盼. GNSS精密单点定位模糊度快速固定技术和方法研究[D]. 武汉: 武汉大学, 2016. [4] 曾琪. BDS/GPS组合动态相对定位及其质量控制方法研究[D]. 武汉: 武汉大学, 2017. [5] HU H, XIE X F, GAO J X, et al. GPS-BDS-Galileo double-differenced stochastic model refinement based on least-squares variance component estimation[J]. Journal of navigation, 2021, 74(6): 1-16. DOI: 10.1017/S0373463321000564 [6] 戴吾蛟, 丁晓利, 朱建军. 基于观测值质量指标的GPS观测量随机模型分析[J]. 武汉大学学报(信息科学版), 2008, 33(7): 718-722. [7] 刘云朋, 尹潇, 楼立志. 高度角信噪比联合随机模型的抗差GPS/COMPASS实时差分定位算法分析[J]. 大地测量与地球动力学, 2014, 34(4): 145-148. [8] 任超, 黄惠, 杨兴跃. 高度角与信号强度联合对精密单点定位的影响[J]. 测绘科学, 2016, 41(4): 24-27. [9] 吕明慧, 李薇, 张宝成, 等. 联合高度角与信噪比的精化随机模型及其对高纬度精密单点定位的影响[J]. 全球定位系统, 2021, 46(3): 15-23,53. DOI: 10.12265/j.gnss.2020122101 [10] 李征航, 黄劲松. GPS测量与数据处理. [M]. 第2版. 武汉: 武汉大学出版社, 2010. [11] 刘万科, 史翔, 朱锋, 等. 谷歌Nexus 9智能终端原始GNSS观测值的质量分析[J]. 武汉大学学报(信息科学版), 2019, 44(12): 1749-1756. [12] 中国卫星导航系统管理办公室. 北斗/全球卫星导航系统(GNSS)测量型接收机观测数据质量评估方法[R]. 中国卫星导航系统管理办公室, 2019. [13] KING R W, BOCK Y. Documentation for the GAMIT GPS analysis software[J/OL]. [2022-03-21]. Mass. inst. of Technol, 1995. http://www-gpsg.mit.eduhsimon/gtgk/GAMIT.poy. [14] GE M, GEBDT G, ROTHACHER M, et al. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations[J]. Journal of geodesy, 2008, 82(7): 389-399. DOI: 10.1007/s00190-007-0187-4 [15] GENDT G, DICK G, REIGBER C, et al. Near real time GPS water vapor monitoring for numerical weather prediction in germany[J]. Journal of the meteorological society of japan. Ser. II, 2004, 82(1B): 361-370. DOI: 10.2151/jmsj.2004.361 [16] 黄劲松, 刘峻宁, 刘成宝, 等. GPS信号载噪比研究[J]. 武汉大学学报(信息科学版), 2007, 32(5): 427-430. [17] BRUNNER F K, HARTINGER H, TROYER L. GPS signal diffraction modelling: the stochastic SIGMA-δ model[J]. Journal of geodesy, 1999, 73(5): 259-267. DOI: 10.1007/S001900050242 [18] 王颖喆, 陶贤露, 朱锋, 等. 利用智能手机实现GNSS原始观测值的高精度差分定位[J]. 武汉大学学报(信息科学版), 2021, 46(12): 1941-1950. [19] 邓辰龙. 多频多系统 GNSS 实时双差模糊度解算理论与方法研究 [D]. 武汉: 武汉大学, 2016. [20] 邝英才, 吕志平, 陈正生, 等. 基于方差分量估计的多模GNSS/声学联合定位方法[J]. 中国惯性技术学报, 2019, 27(2): 181-189. -




 点击查看大图
点击查看大图

图(8) / 表(4)
计量
- 文章访问数: 478
- HTML全文浏览量: 142
- PDF下载量: 117
- 被引次数: 0
