

Study on a tight integrated navigation and positioning algorithm of GNSS/visual observation
-
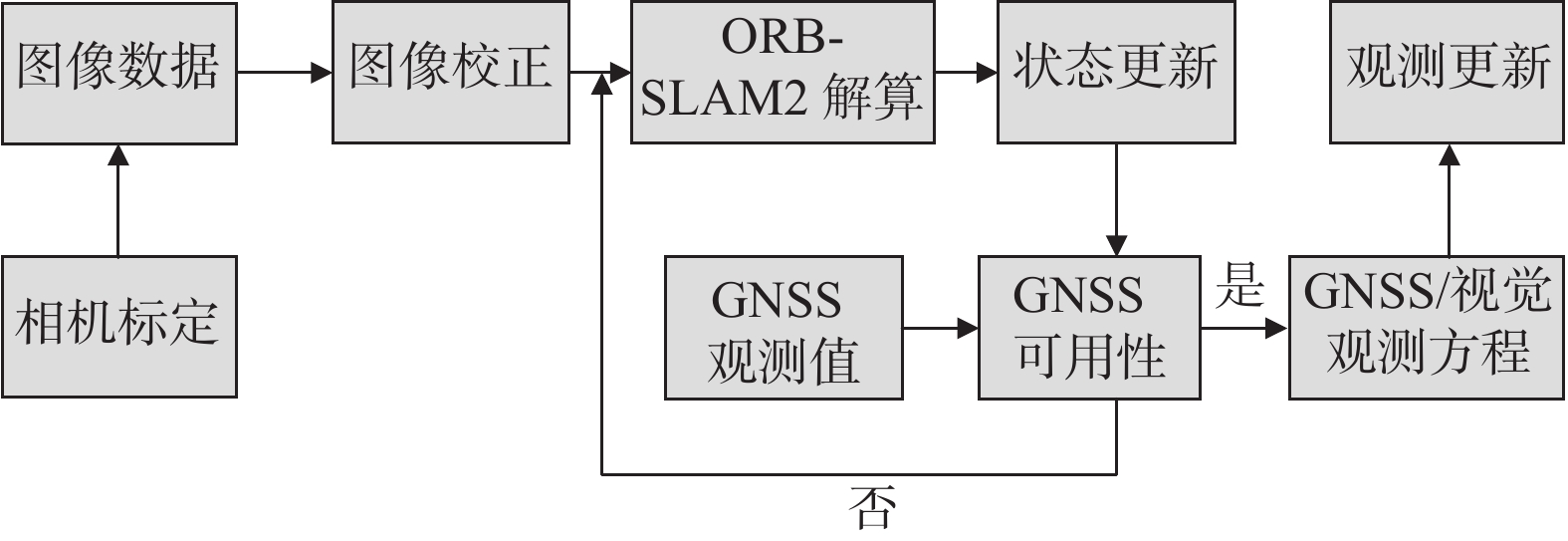
摘要: 全球卫星导航系统(GNSS)在弱信号环境下,GNSS信号易受到遮挡或者电磁干扰,严重影响导航定位的可靠性、连续性和精度. 针对此问题,本文作者研究了一种GNSS和视觉观测紧组合导航定位方法. 首先基于相机采集图像数据,利用ORB-SLAM2开源平台求解得到视觉位置结果增量,再联合GNSS伪距观测数据采用卡尔曼滤波(KF)进行组合定位解算. 采用实测的GNSS伪距观测数据和图像数据进行测试,试验结果表明:该算法不仅能有效地提升GNSS弱信号环境下导航定位的连续性和精度,还能在卫星数少于4颗时保持持续导航定位.
-
关键词:
- 视觉导航 /
- 全球卫星导航系统(GNSS) /
- GNSS弱信号环境 /
- 紧组合 /
- 卡尔曼滤波(KF)
Abstract: The Global Navigation Satellite System (GNSS) signals are susceptible to occlusion or electromagnetic interference in weak GNSS environments, which may seriously affect the reliability, continuity and accuracy of navigation and positioning. To solve this problem, this paper studies a tightly integrated navigation and positioning method with GNSS and visual combined observations. Firstly, with the image data collected by the camera, the ORB-SLAM2 open source platform is used to obtain the visual position result increment, and then combined with the GNSS pseudo-range observation data using Kalman filter for combined positioning solution. Validation is conducted with measured GNSS pseudo-range observation data and image data, the test results show that the algorithm can not only effectively improve the continuity and accuracy of navigation and positioning in weak GNSS environment, but also maintain continuous navigation when the number of satellites is less than four. -

图 3 试验推车平台示意图
注:1. 2个Point Grey相机(GS3-U3-23S6C-C);2. 1套NovAtel 天线及接收机设备(NovAtel-SE);3. 1套FSAS惯性导航设备(iMAR-FSAS).
表 1 四种方法的误差结果统计
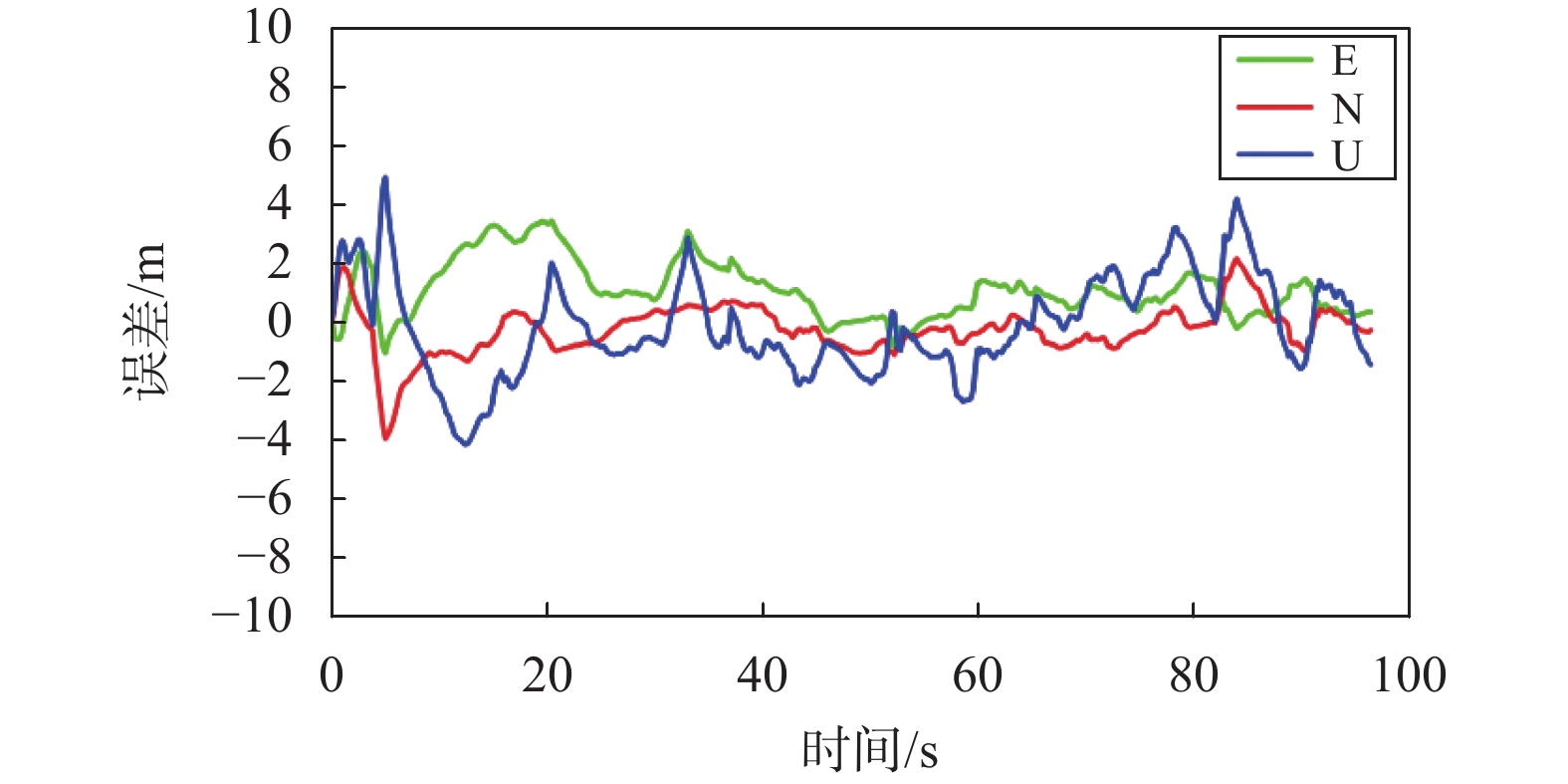
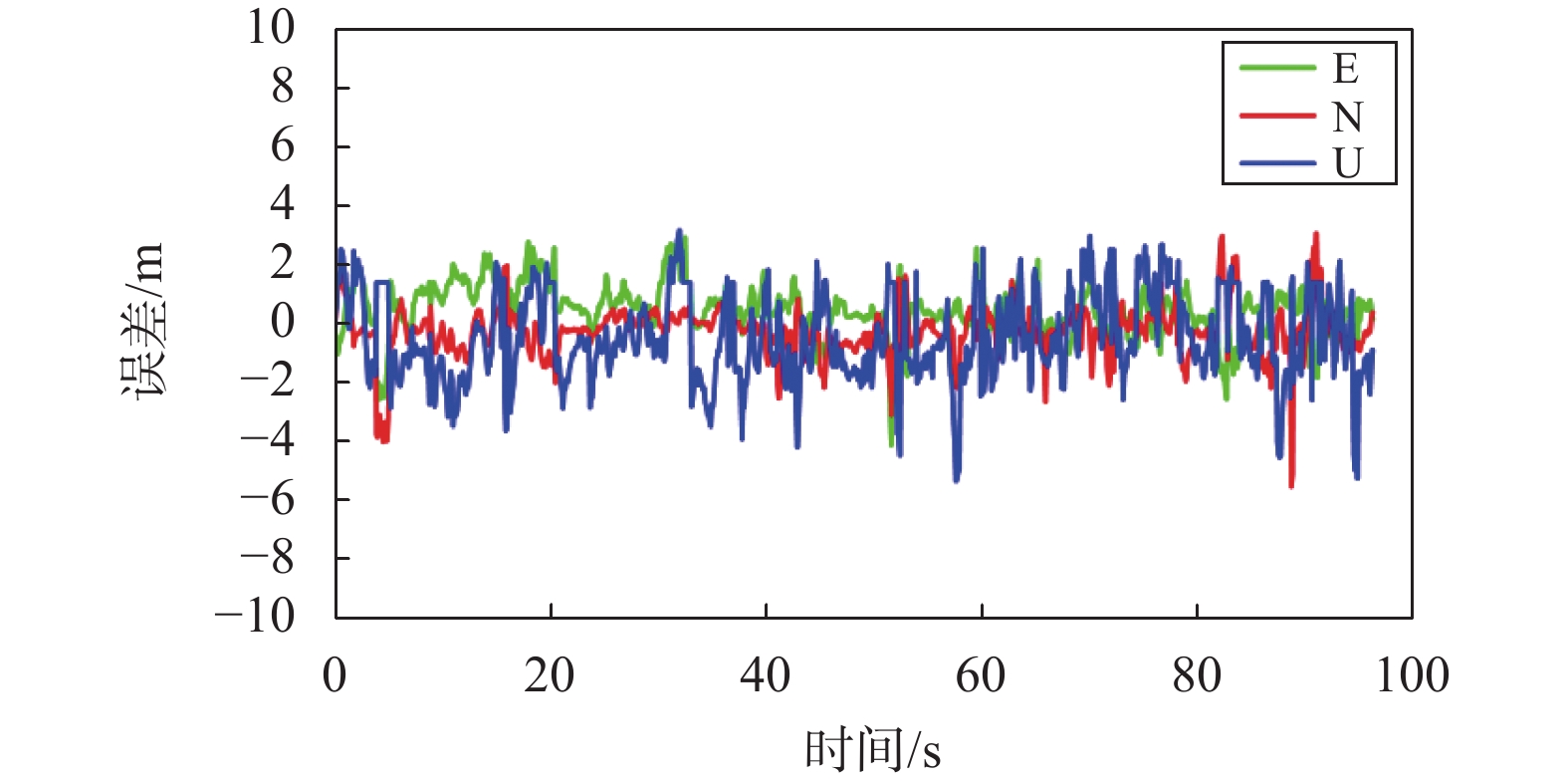
m 方法 误差RMS 误差最大值 E N U E N U 纯视觉 2.58 6.43 1.42 4.58 10.49 2.51 GPS SPP 1.92 1.53 3.66 7.19 8.60 15.57 松组合 1.43 0.87 1.67 3.39 3.98 4.87 紧组合 1.03 0.86 1.52 4.02 5.41 5.22  下载: 导出CSV
下载: 导出CSV
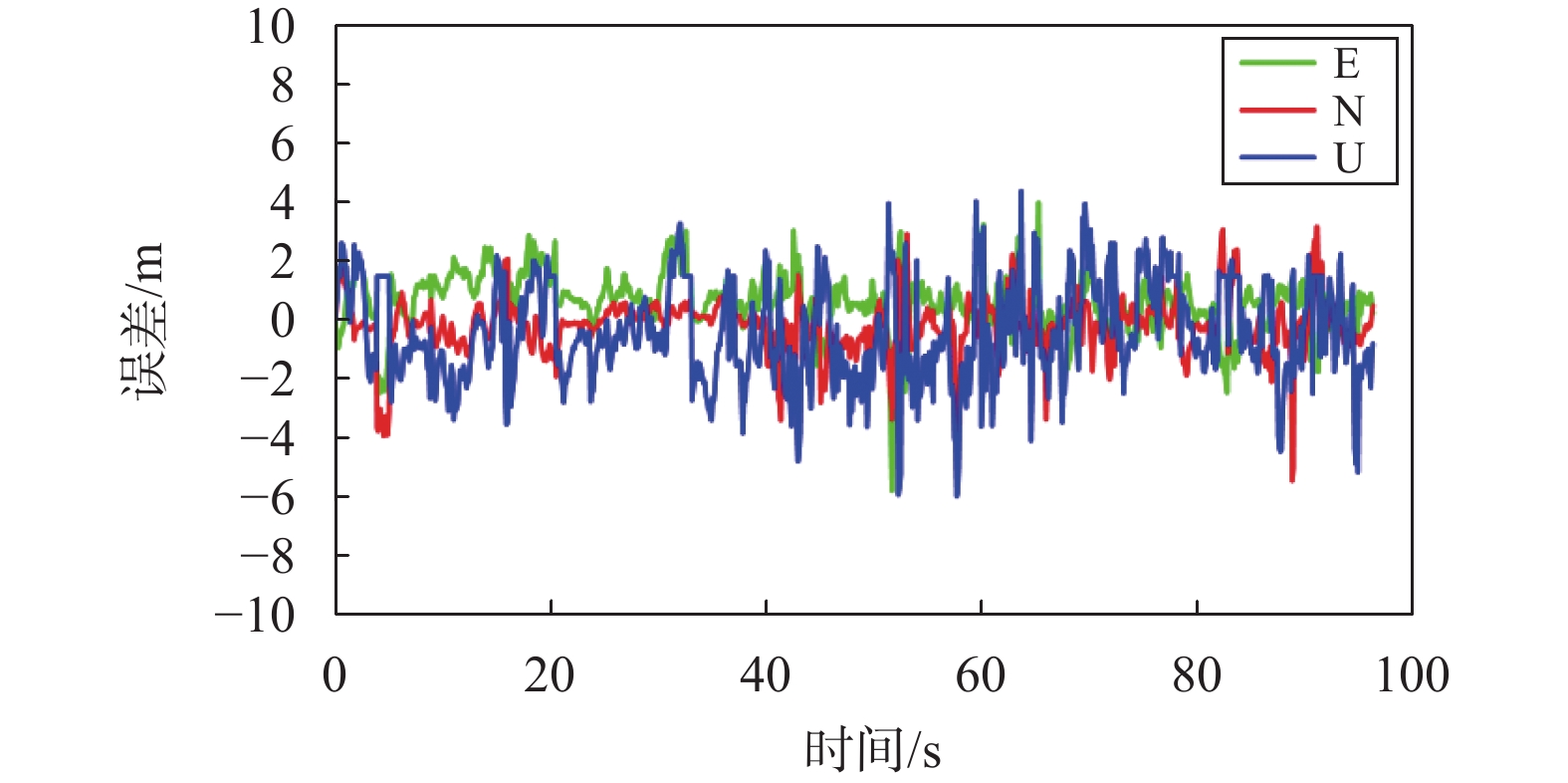
表 2 模拟卫星数量少于4颗时松组合和紧组合误差结果统计
m 方法 误差RMS 误差最大值 E N U E N U 松组合 1.61 1.79 1.90 3.39 4.13 4.87 紧组合 1.12 0.95 1.70 5.76 5.41 5.95
下载: 导出CSV
-
[1] 杨元喜. 弹性PNT基本框架[J]. 测绘学报, 2018, 47(7): 893-898. DOI: 10.11947/j.AGCS.2018.20180149 [2] CHEN X, HU W D, ZHANG L F, et al. Integration of low-cost GNSS and monocular cameras for simultaneous localization and mapping[J]. Sensors, 2018, 18(7): 2193. DOI: 10.3390/s18072193 [3] 冯黎, 郭承军. 基于GNSS/SINS/双目视觉里程计的车载导航系统分析与设计[J]. 汽车技术, 2019(10): 37-41. [4] 陈锐志, 王磊, 李德仁, 等. 导航与遥感技术融合综述[J]. 测绘学报, 2019, 48(12): 1507-1522. [5] 曾庆喜, 邱文旗, 冯玉朋, 等. GNSS/VO组合导航研究现状及发展趋势[J]. 导航定位学报, 2018, 6(2): 1-6. [6] AUMAYER B M, PETOVELLO M G, LACHAPELLE G. Development of a tightly coupled vision/GNSS system[C]// The 27th International Technical Meeting of the Satellite Division of The Institute of Navigation, 2014: 2202-2211. [7] 钱闯. 弱GNSS信号区域的GNSS/INS/LiDAR高精度定位方法及其应用研究[D]. 武汉: 武汉大学, 2017. [8] 高翔, 张涛. 视觉SLAM十四讲[M]. 北京: 电子工业出版社, 2017. [9] MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo and RGB-D cameras[J]. 2016, 33(5): 1255-1262. DOI: 10.1109/TRO.2017.2705103 [10] ZHANG Z Y. A flexible new technique for camera calibration[J]. IEEE transactions on pattern analysis and machine intelligence, 2000, 22(11): 1330-1334. DOI: 10.1109/34.888718 [11] 冯祎, 涂锐, 韩军强, 等. 双目视觉辅助GNSS在恶劣环境下导航定位[J]. 全球定位系统, 2020, 45(3): 48-53. -




 点击查看大图
点击查看大图

图(11) / 表(2)
计量
- 文章访问数: 478
- HTML全文浏览量: 124
- PDF下载量: 45
- 被引次数: 0
