

Real time and high precision time synchronization method of LEO satellite based on RT-PPP
-
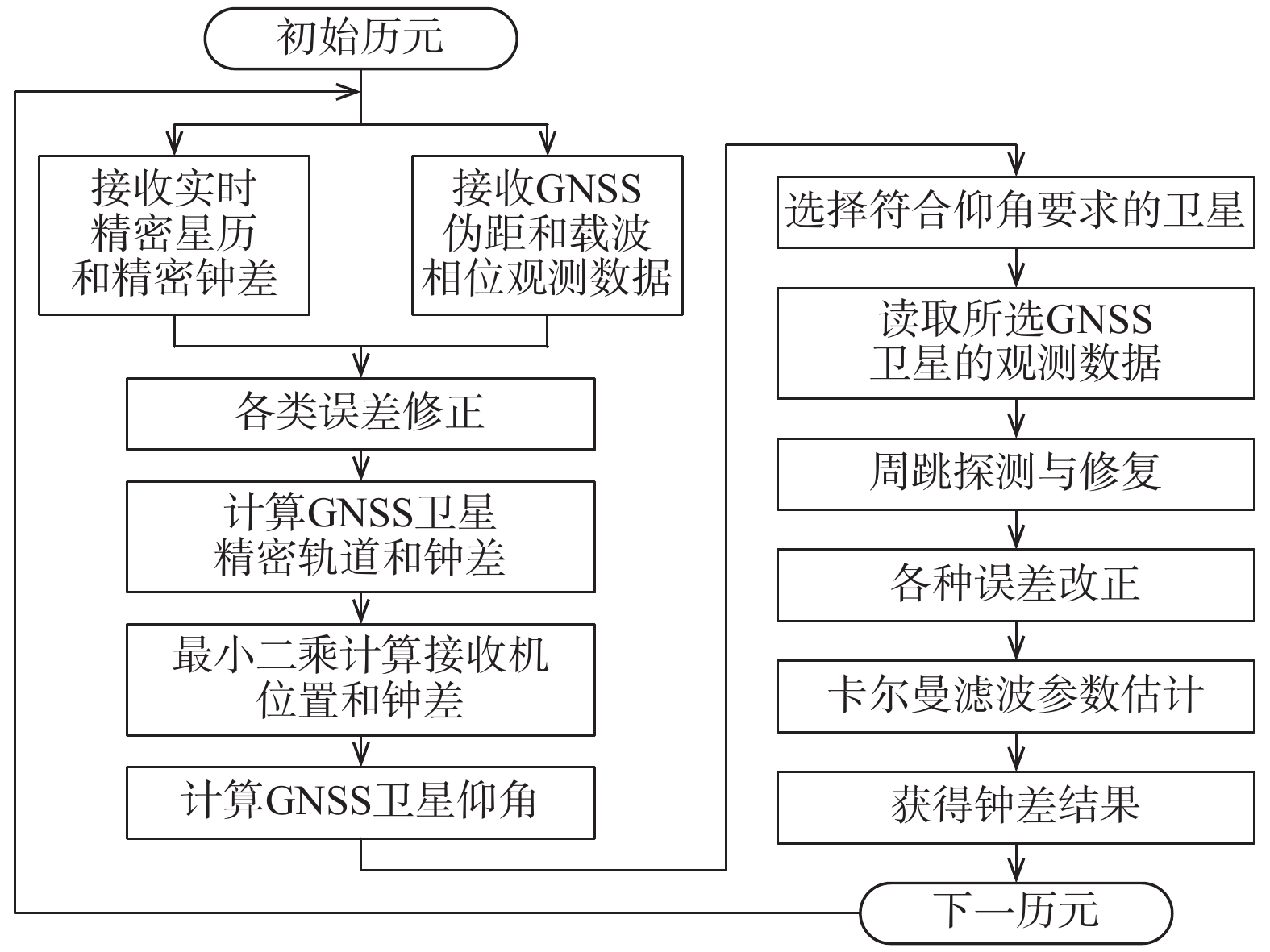
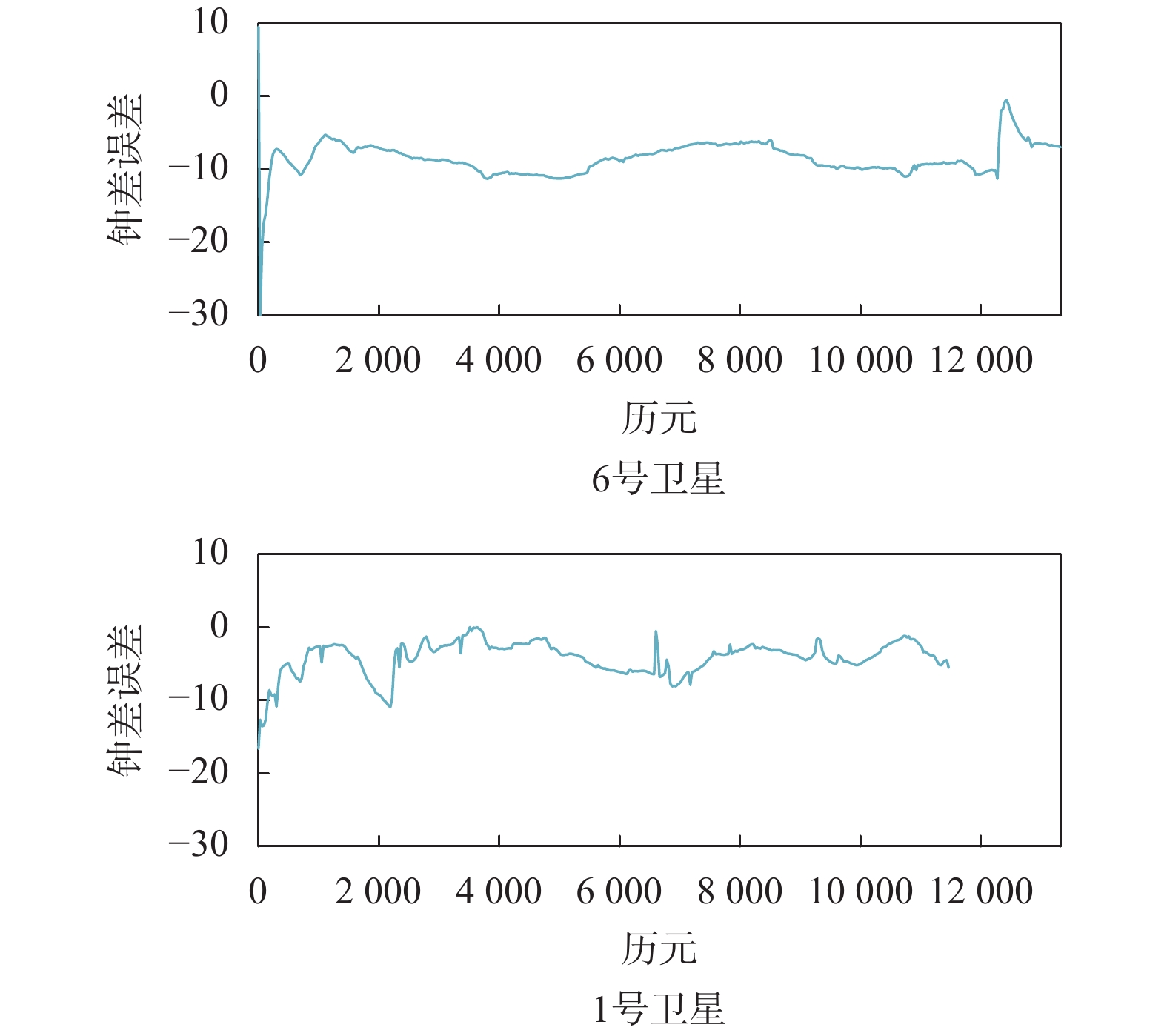
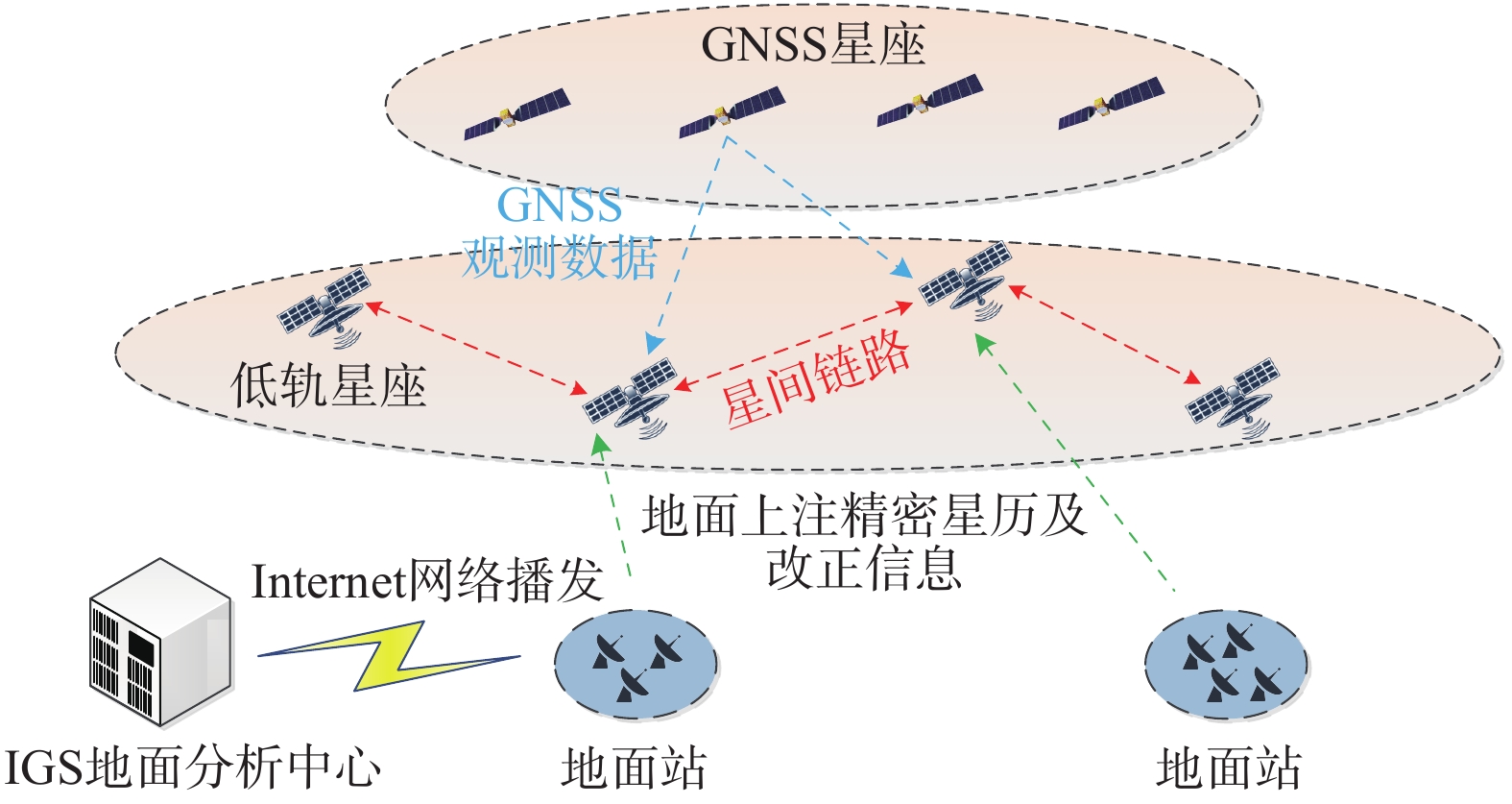
摘要: 实现低轨导航增强的关键前提是实现低轨星座的整网时间同步,本文针对低轨导航增强系统,提出了一种基于实时精密单点定位(RT-PPP)的低轨卫星高精度时间同步方法,以解决低轨星座实时高精度时间同步的问题. 本文分析了在处理过程中存在的各类误差,介绍了低轨卫星采用状态空间(SSR)改正信息通过精密单点定位(PPP)实现实时高精度时间同步方法的处理流程,将此方法应用于气象、电离层与气候星座观测系统(COSMIC)卫星实测数据的处理,并将该方法与采用广播星历伪距的方法以及事后精密星历的方法进行了比较分析. 结果表明:采用SSR改正信息PPP的方式对2颗COSMIC卫星进行GPS双频观测值的解算,得到的轨道误差的标准差在分米级,钟差误差标准差分别在2.4 ns和2.3 ns左右,可以达到纳秒级. 通过对不同方法解算的结果进行比较可以看出,采用SSR改正信息PPP的方法明显优于采用广播星历伪距方法的解算精度,且与事后精密星历PPP的方法解算精度相当.
-
关键词:
- 低轨导航增强 /
- 时间同步 /
- 精密单点定位(PPP) /
- 电离层与气候星座观测系统(COSMIC)卫星 /
- 状态空间(SSR)改正信息
Abstract: The key premise of the low orbit navigation enhancement is to realize the whole network time synchronization of the low earth orbit (LEO) constellation. In order to solve the problem of real-time and high-precision time synchronization of LEO constellation, a high-precision time synchronization method based on real-time precise point positioning (RT-PPP) is proposed for LEO navigation augmentation system. This paper analyzes all kinds of errors in the process of processing, introduces the processing flow of real-time and high-precision time synchronization method of LEO satellite using state space representation (SSR) correction information and precise point positioning, and applies this method to the processing of measured data of constellation observing system for meteorology, ionosphere and climate (COSMIC) satellites. The results show that the standard deviation of orbit error is in decimeter level, and the standard deviation of clock error is about 2.4 ns and 2.3 ns respectively, which can reach nanosecond level. By comparing the results of different methods, it can be seen that the PPP method using SSR correction information is obviously better than the pseudorange method using broadcast ephemeris, and the accuracy is equivalent to the PPP method using post precise ephemeris. -
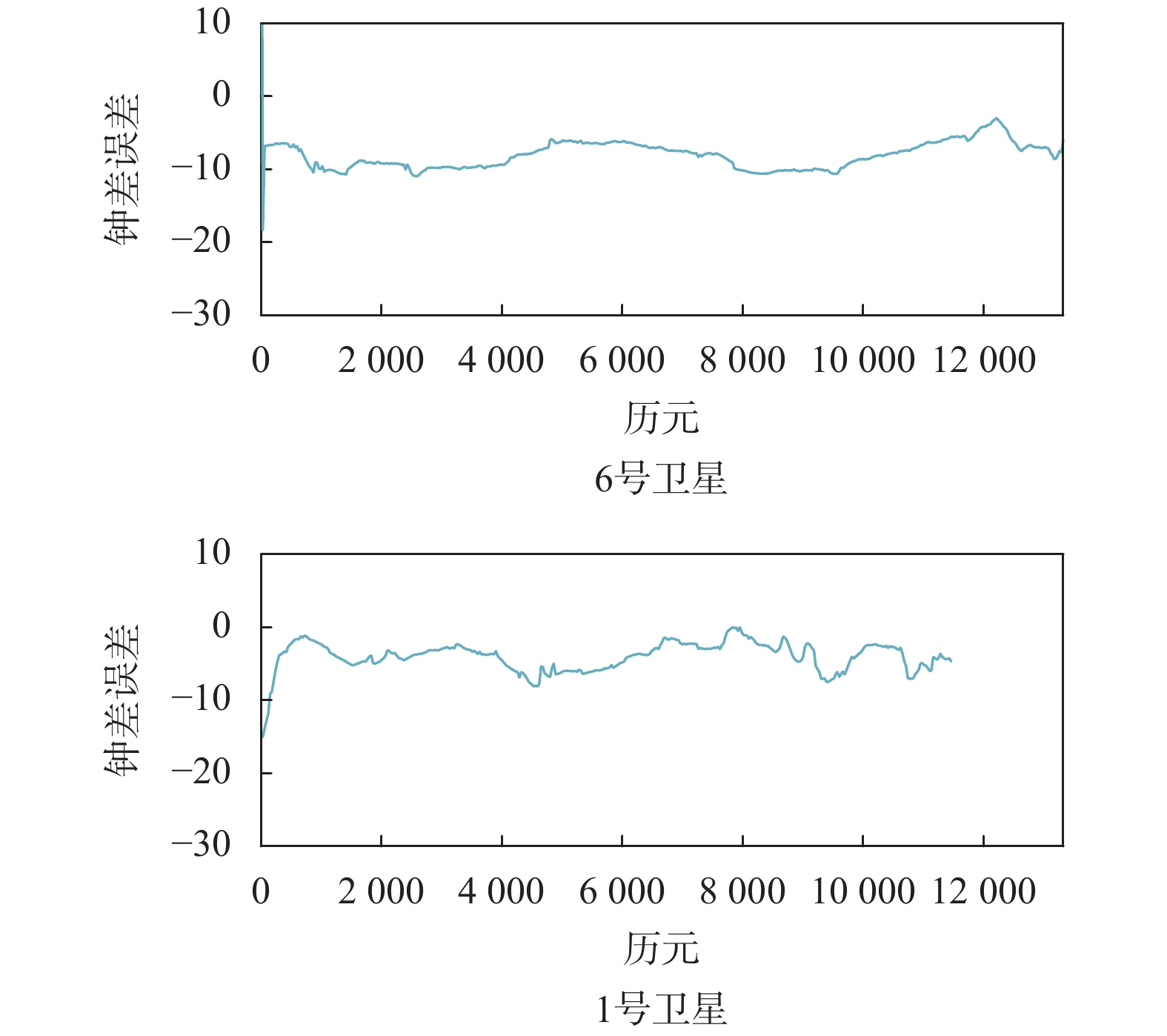
表 2 6号卫星和1号卫星采用方案1的解算结果与参考结果的差异统计
分量 均值 标准差 6号 1号 6号 1号 径向/m 0.480 6 0.595 0 0.832 2 0.504 2 切向/m −0.092 7 −0.455 4 0.604 5 0.931 0 法向/m 0.285 1 0.443 5 0.642 1 0.855 7 钟差/ns −8.489 7 −4.206 5 2.433 4 2.352 4  下载: 导出CSV
下载: 导出CSV
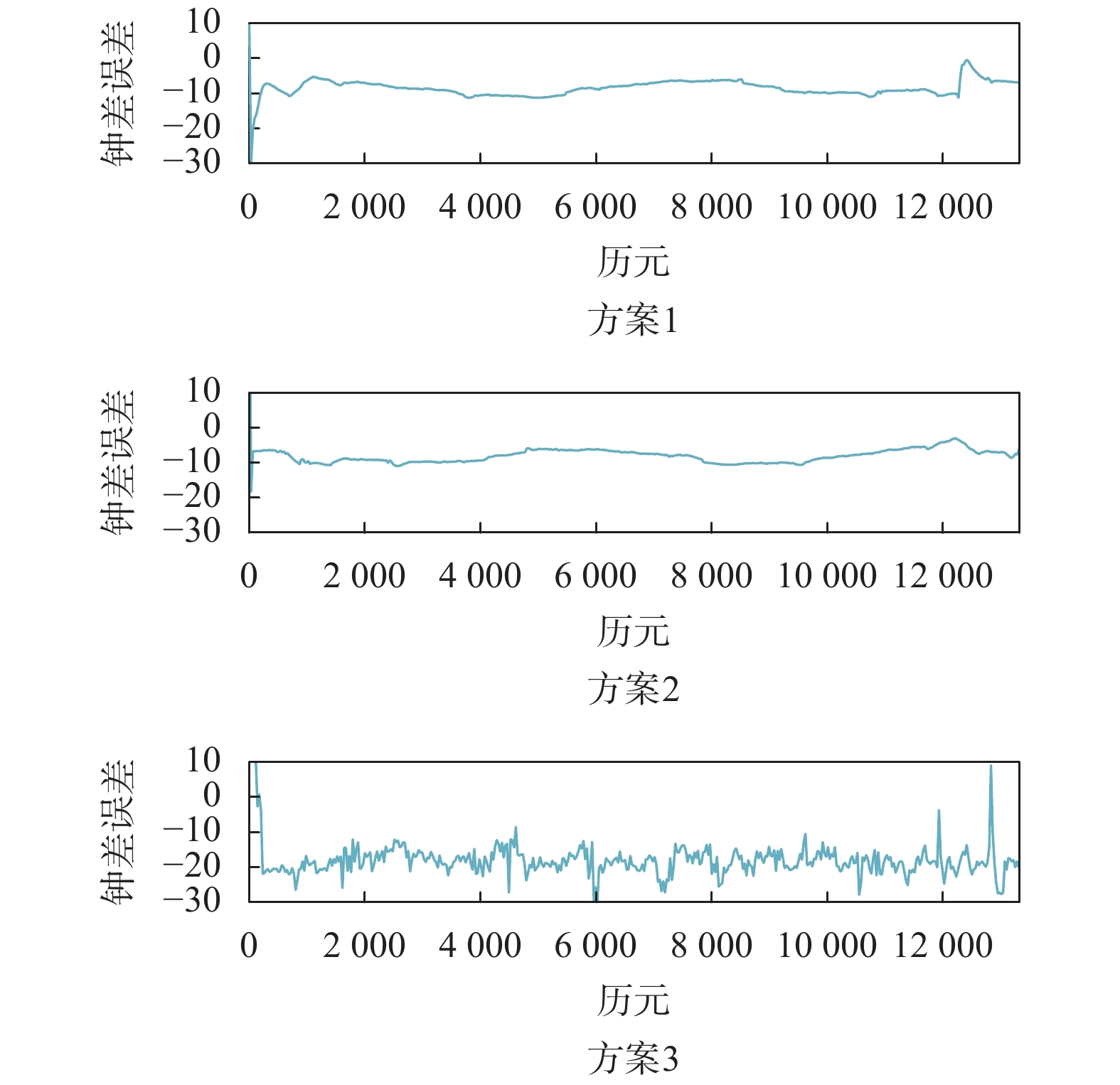
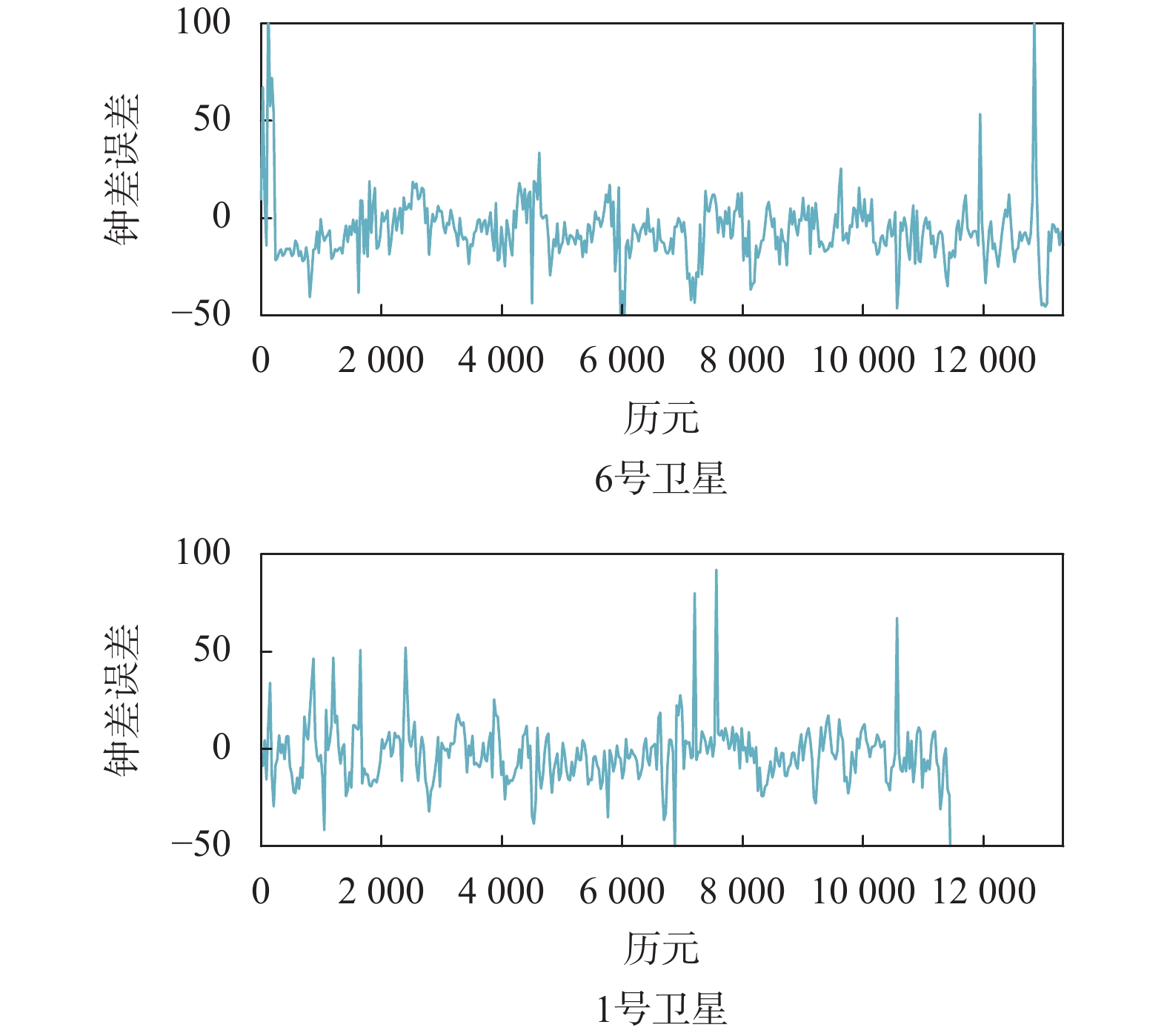
表 3 6号卫星采用方案2和方案3的解算结果与参考结果的差异统计
分量 均值 标准差 方案2 方案3 方案2 方案3 经向/m −0.604 8 0.226 8 5.391 2 0.673 3 切向/m −0.433 3 −0.058 3 6.026 2 0.684 8 法向/m −0.282 3 0.077 5 4.970 5 0.507 6 钟差/ns −6.581 4 −7.902 6 16.707 1 2.094 0
下载: 导出CSV
表 4 1号卫星采用方案2和方案3的解算结果与参考结果的差异统计
分量 均值 标准差 方案2 方案3 方案2 方案3 径向/m 0.854 6 0.603 2 4.561 5 0.406 2 切向/m 0.138 8 −0.460 7 6.145 6 0.722 6 法向/m 0.215 7 0.459 2 3.980 1 0.766 1 钟差/ns −2.552 9 −4.065 9 15.819 9 2.073 0
下载: 导出CSV
-
[1] 张小红, 马福建. 低轨导航增强GNSS发展综述[J]. 测绘学报, 2019, 48(9): 1073-1087. DOI: 10.11947/j.AGCS.2019.20190176 [2] 杨元喜. 综合PNT体系及其关键技术[J]. 测绘学报, 2016, 45(5): 505-510. DOI: 10.11947/j.AGCS.2016.20160127 [3] 刘瑶. 应用于低轨导航增强卫星系统的实时高精度定位算法研究[D]. 南京: 南京航空航天大学, 2018. [4] 胡洪. GNSS精密单点定位算法研究与实现[D]. 徐州: 中国矿业大学, 2014. [5] 谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2009. [6] 彭东菊, 吴斌. GIM在LEO卫星单频GPS定轨中的应用[J]. 天文学报, 2012, 53(1): 36-49. DOI: 10.3969/j.issn.0001-5245.2012.01.004 [7] MONTENBRUCK O, GILL E. Ionospheric correction for GPS tracking of LEO satellites[J]. Journal of navigation, 2002(55): 293-304. DOI: 10.1017/S0373463302001789 [8] 张小红, 蔡诗响, 李星星, 等. 利用GPS精密单点定位进行时间传递精度分析[J]. 武汉大学学报(信息科学版), 2010, 35(3): 274-278. [9] 郝明, 丁希杰. GPS精密单点定位的数据处理方法综述[J]. 测绘工程, 2008, 17(5): 60-62. DOI: 10.3969/j.issn.1006-7949.2008.05.017 [10] 董建军, 徐爱功, 高猛, 等. GPS实时精密单点定位精度与收敛性分析[J]. 导航定位学报, 2018, 6(3): 92-97. DOI: 10.3969/j.issn.2095-4999.2018.03.017 [11] 柯伟. 基于CNES实时星历的精密单点定位精度分析[J]. 城市勘测, 2016(6): 93-96. DOI: 10.3969/j.issn.1672-8262.2016.06.026 [12] 刘志强, 王解先. 广播星历SSR改正的实时精密单点定位及精度分析[J]. 测绘科学, 2014, 39(1): 15-19, 109. [13] WANG L, LI Z, GE M, et al. Investigation of the performance of real-time BDS-only precise point positioning using the IGS real-time service[J]. GPS solutions, 2019, 23(3): 66. DOI: 10.1007/s10291-019-0856-9 [14] 夏凤雨, 叶世榕, 赵乐文, 等. 基于SSR改正的实时精密单点定位精度分析[J]. 导航定位与授时, 2017(3): 52-57. [15] LI X X, WU J Q, ZHANG K K, et al. Real-time kinematic precise orbit determination for LEO satellites using zero-differenced ambiguity resolution[J]. Remote sensing, 2019, 11(23): 2815. DOI: 10.3390/rs11232815 [16] LU J, GUO X, SU C. Global capabilities of BeiDou Navigation Satellite System[J]. Satellite navigation, 2020, 1(1): 27. DOI: 10.1186/s43020-020-00025-9 [17] 刘经南, 叶世榕. GPS非差相位精密单点定位技术探讨[J]. 武汉大学学报(信息科学版), 2002, 27(3): 234-240. [18] 叶世榕. GPS非差相位精密单点定位理论与实现[D]. 武汉: 武汉大学, 2002. [19] 李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社, 2005. [20] 郭金运. COSMIC卫星任务概况[C]//中国空间科学学会. 中国空间科学学会空间探测专业委员会第十九次学术会议论文集(下册). 2006: 645-649. [21] XIA P F, YE S R, JIANG K C, et al. Estimation and evaluation of COSMIC radio occultation excess phase using undifferenced measurements[J]. Atmospheric measurement techniques, 2017, 10(5): 1813-1821. DOI: 10.5194/amt-10-1813-2017 [22] 郭金运, 黄金维, 曾子榜, 等. 基于星载GPS非差数据的COSMIC卫星几何定轨研究[J]. 自然科学进展, 2008, 18(1): 75-80. DOI: 10.3321/j.issn:1002-008X.2008.01.010 [23] TSENG T P, ZHANG K F, HWANG C, et al. Assessing antenna field of view and receiver clocks of COSMIC and GRACE satellites: lessons for COSMIC-2[J]. GPS solutions, 2014, 18(2): 219-230. DOI: 10.1007/s10291-013-0323-y [24] LI Y S, HWANG C, TSENG T P, et al. A near-real-time automatic orbit determination system for COSMIC and its follow-on satellite mission: analysis of orbit and clock errors on radio occultation[J]. IEEE transactions on geoscience and remote sensing, 2014, 52(6): 3192-3203. DOI: 10.1109/TGRS.2013.2271547 -


 点击查看大图
点击查看大图
图(9) / 表(4)
计量
- 文章访问数: 420
- HTML全文浏览量: 321
- PDF下载量: 61
- 被引次数: 0
