

Airborne radar power line inspection based on multi-GNSS fusion precise single point positioning
-
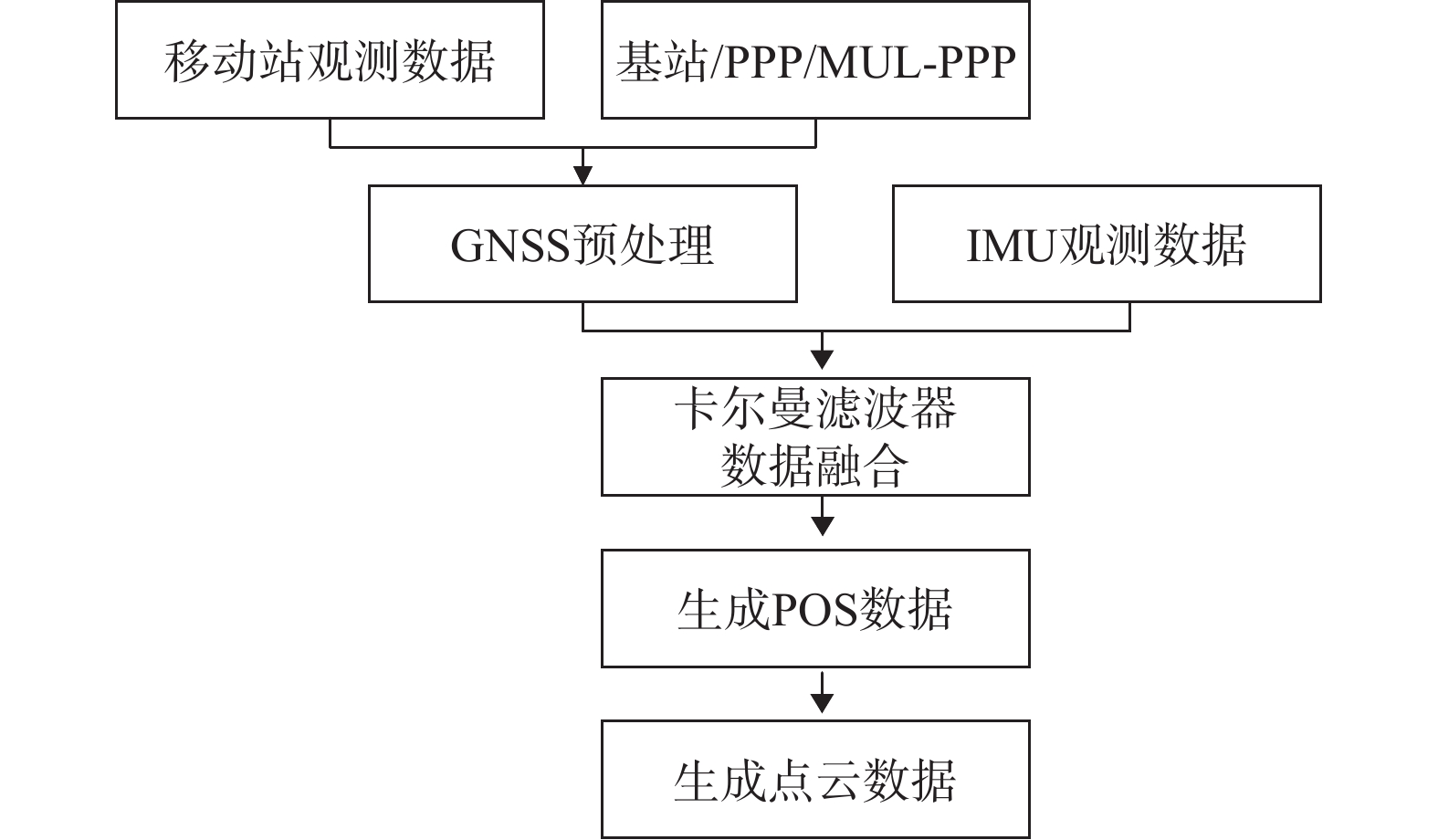
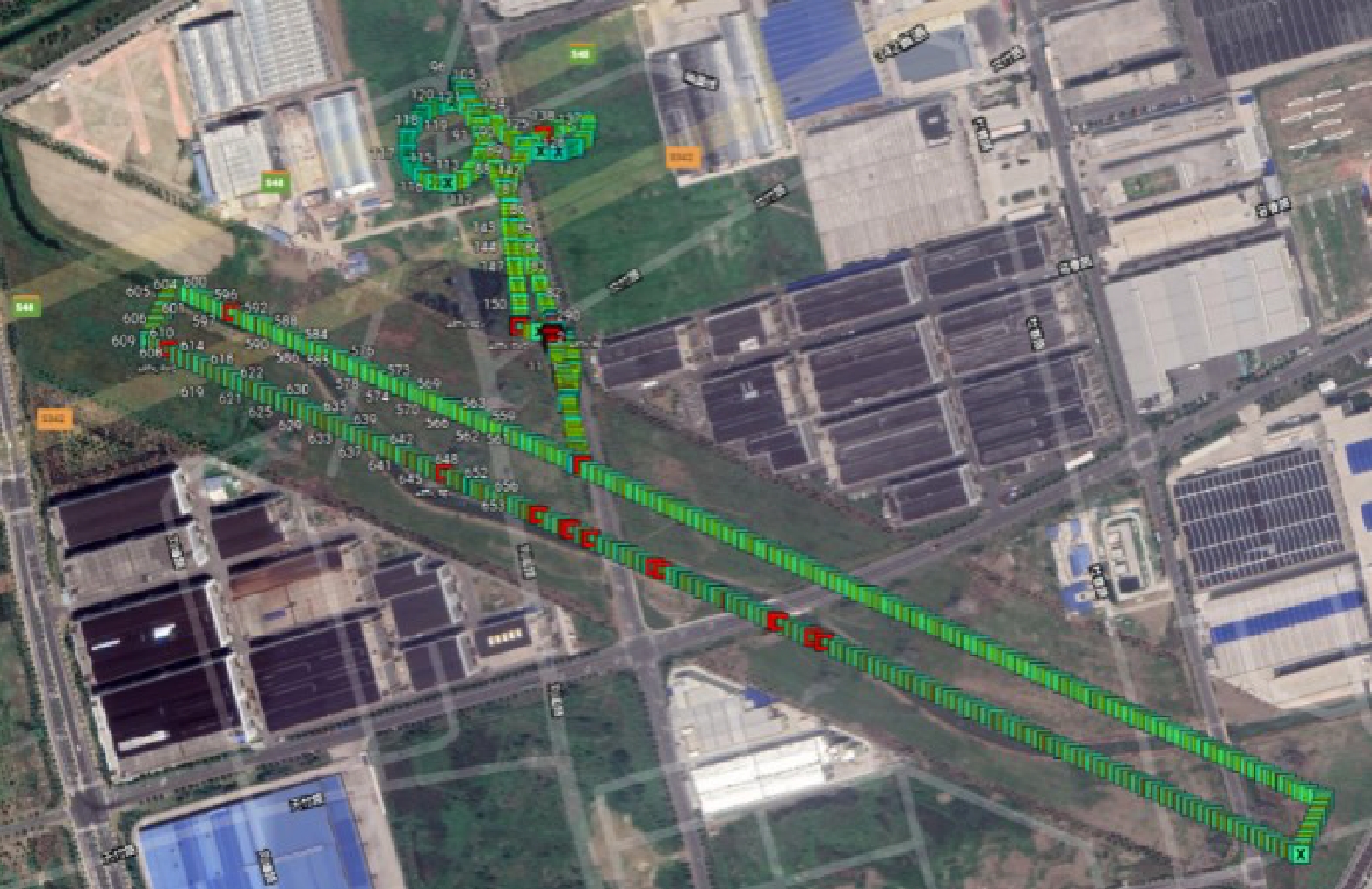
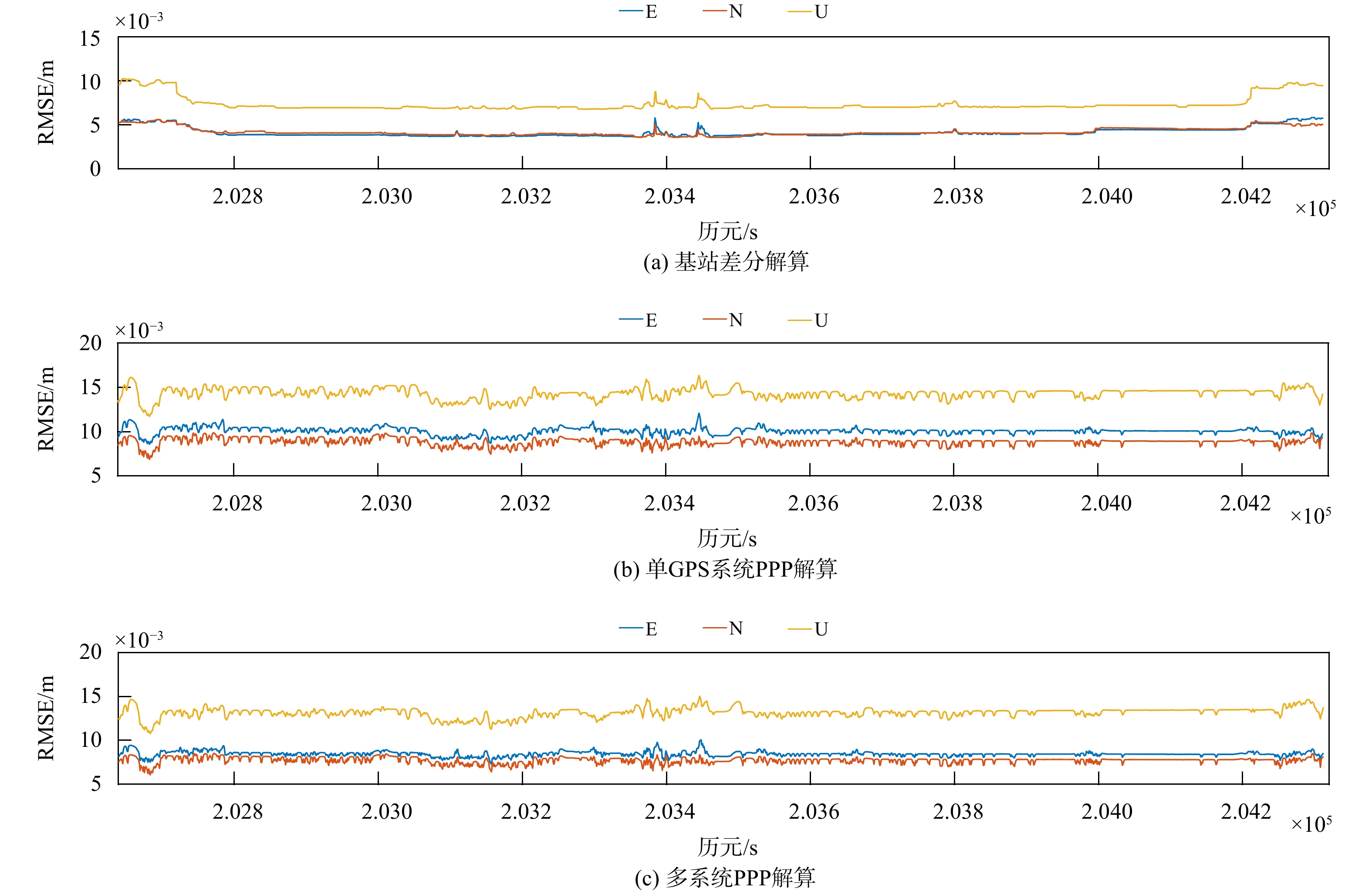
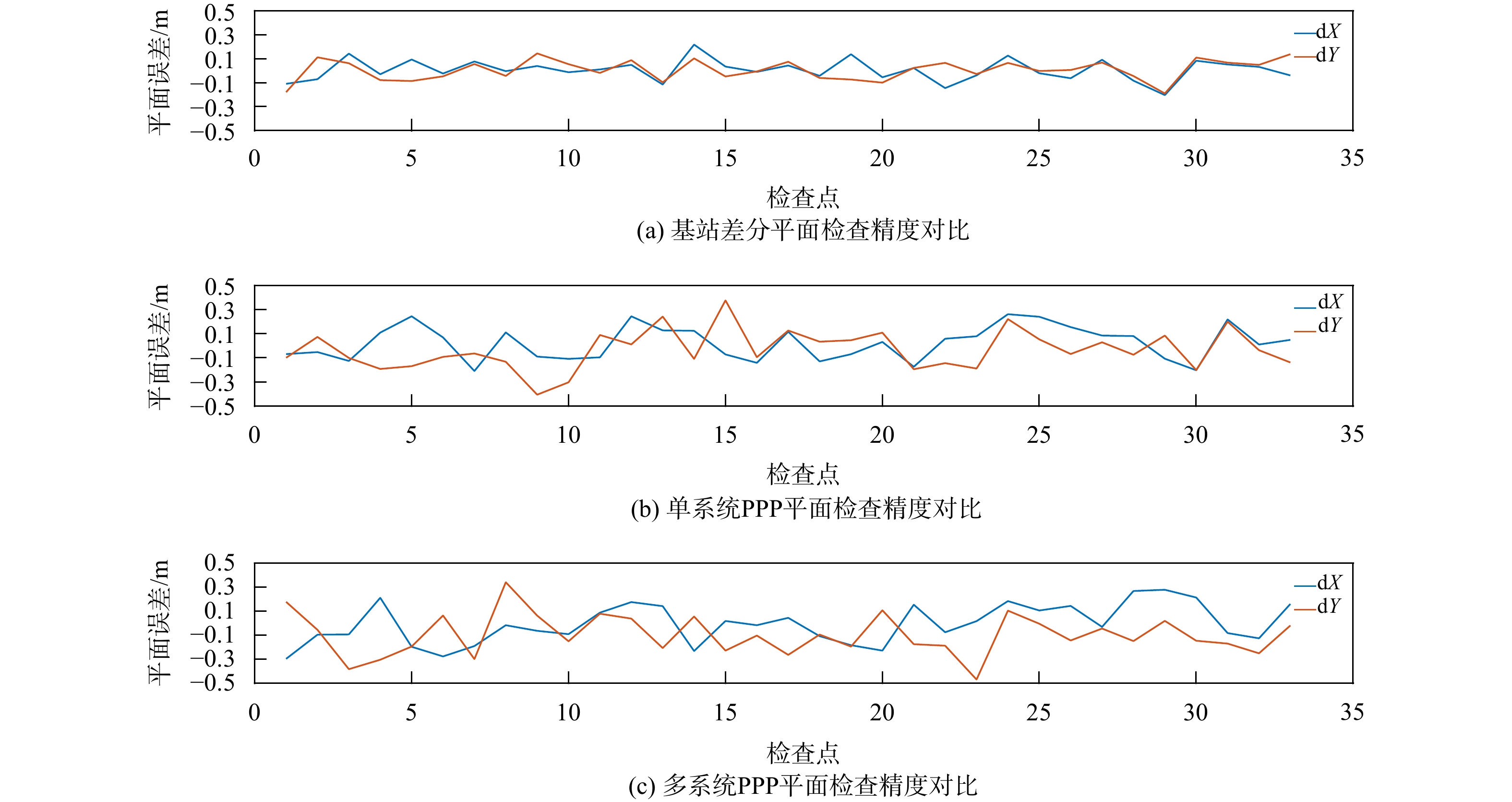
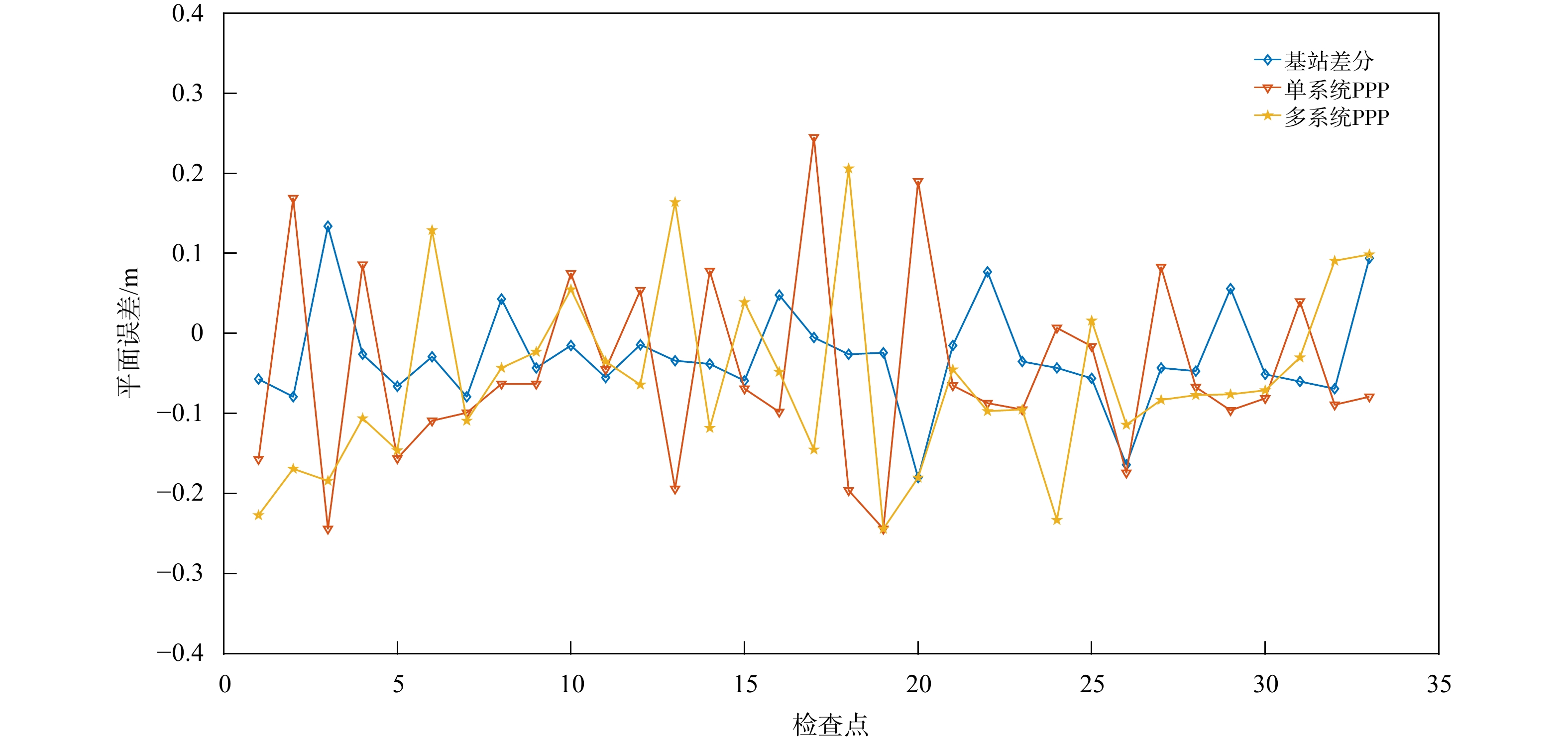
摘要: 通过无人机搭载激光雷达(LiDAR)测量系统进行电力线巡检实验,提出了一种基于多系统精密单点定位(PPP)的机载LiDAR电力线巡检方法,重点分析了基站差分、单系统PPP、多系统融合PPP三种处理策略生成POS数据的方法,并利用江苏省中北部采集的机载雷达数据及人工布设的控制点结果进行验证. 实验结果表明:三种方法得到的POS数据均方根误差(RMSE)均在0.016 m以内,与单系统PPP相比,多系统PPP在高程方向提高了12%,在东(E)方向提高了21%,在北(N)方向提高了17%,文中提出的方法生成三维(3D)点云数据精度较高,生成的点云数据精度满足精细电力线巡检的要求.
-
关键词:
- 精密单点定位(PPP) /
- 机载激光雷达(LiDAR) /
- 电力线巡检 /
- 多源数据融合 /
- 点云数据精度
Abstract: Through the power line inspection experiment of UAV equipped with light detection and ranging (LiDAR) measurement system, this paper proposes an airborne LiDAR power line inspection method based on multi-system precise single-point positioning. The article focuses on the analysis of the three processing strategies of base station differential, single-system precision single point positioning (PPP), and multi-system fusion PPP to generate POS data. The airborne LiDAR data are collected in the north-central part of Jiangsu Province and the results of manually placed control points for verification. The experimental results show that the root mean square error of the POS data obtained by the three methods are all within 0.016 m. Compared with the single-system PPP, the multi-system precision single-point positioning increases by 12% in the elevation direction and 21% in the east (E) direction. The north (N) direction has increased by 17%. The method proposed in this paper has high accuracy in generating three dimensional (3D) point cloud data, and the accuracy of the generated point cloud data meets the requirements of fine power line inspection. -
[1] 张小红. 机载激光雷达测量技术理论与方法[M]. 武汉: 武汉大学出版社, 2007. [2] 杨必胜, 董震. 点云智能处理[M]. 北京: 科学出版社, 2020. [3] 杜跃飞, 刘正军, 冯天文. PPP技术与机载激光雷达在电力线巡检中的应用研究[J]. 遥感技术与应用, 2019, 34(2): 263-268. [4] KILISZEK D, KROSZCZYŃSKI K. Performance of the precise point positioning method along with the development of GPS, GLONASS and Galileo systems[J]. Measurement, 2020(164): 108009. DOI: 10.1016/j.measurement.2020.108009 [5] 周锋. 多系统GNSS非差非组合精密单点定位相关理论和方法研究[J]. 测绘学报, 2020, 49(7): 938. [6] DUONG V, HARIMA K, CHOY S, et, al. An optimal linear combination model to accelerate PPP convergence using multi-frequency multi-GNSS measurements [J]. GPS solutions, 2019, 23(2): 1-14. DOI : 10.1007/s10291-019-0842-2 [7] CAI C S, GONG Y Z, GAO Y, et al. An approach to speed up single-frequency PPP convergence with quad-constellation GNSS and GIM[J]. Sensors, 2017, 17(6): 1302. DOI: 10.3390/s17061302 [8] 任晓东, 张柯柯, 李星星, 等. BeiDou、Galileo、GLONASS、GPS多系统融合精密单点[J]. 测绘学报, 2015, 44(12): 1307-1313. [9] 袁修孝, 付建红, 楼益栋. 基于精密单点定位技术的GPS辅助空中三角测量[J]. 测绘学报, 2007, 36(3): 251-255. DOI: 10.3321/j.issn:1001-1595.2007.03.002 [10] 张小红, 刘经南, FORSBERG R. 基于精密单点定位技术的航空测量应用实践[J]. 武汉大学学报(信息科学版), 2006, 31(1): 19-22,46. [11] 吴俊, 耿迅, 刘勇. 精密单点定位技术在GPS/IMU辅助航空摄影测量中的应用[C]//第二届"测绘科学前沿技术论坛", 2010. [12] 张荣斗. PPP与DGPS方法在机载激光雷达测量中应用的比较分析[J]. 工程勘察, 2016, 44(6): 67-70. [13] 张守建, 王伟. 多系统融合精密单点定位性能分析[J]. 大地测量与地球动力学, 2017, 37(10): 1065-1069. [14] 吕德亮, 贺岩, 俞家勇, 等. 机载双频激光雷达结构误差与定位精度研究[J]. 激光与光电子学进展, 2018, 55(8): 48-55. -

 下载:
下载:
 点击查看大图
点击查看大图

图(6) / 表(1)
计量
- 文章访问数: 227
- HTML全文浏览量: 211
- PDF下载量: 19
- 被引次数: 0
