

UAV track planning algorithm in concave polygonal area based on remote sensing mission
-
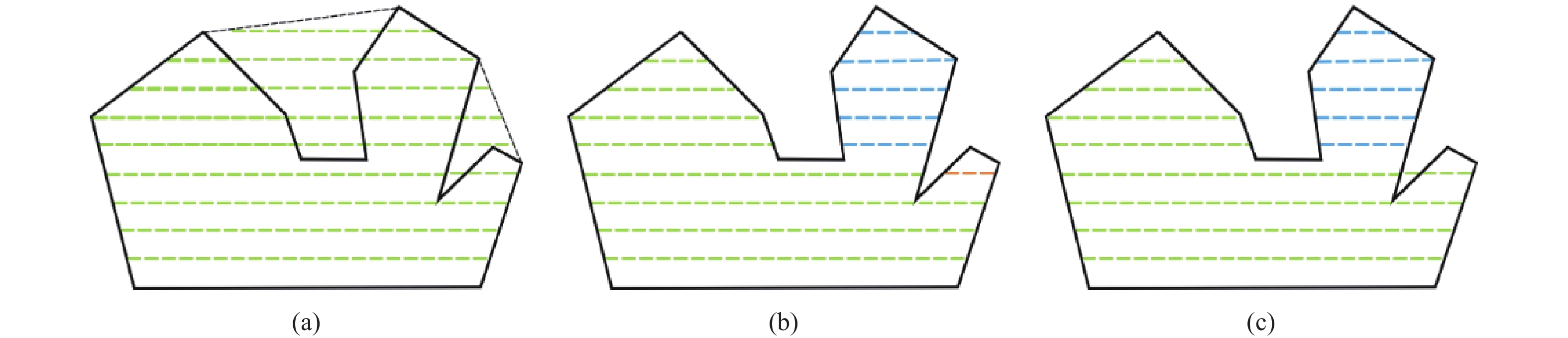
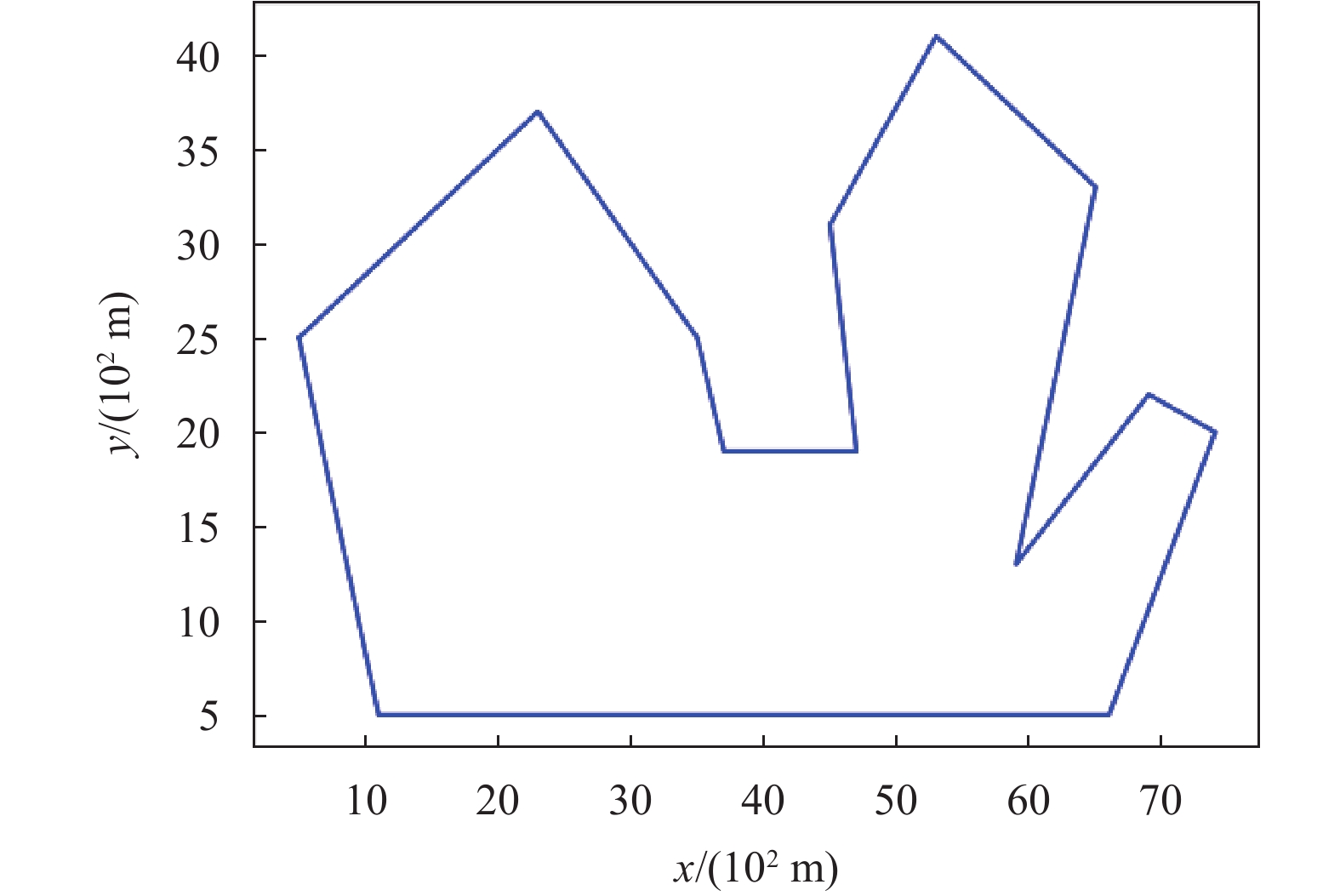
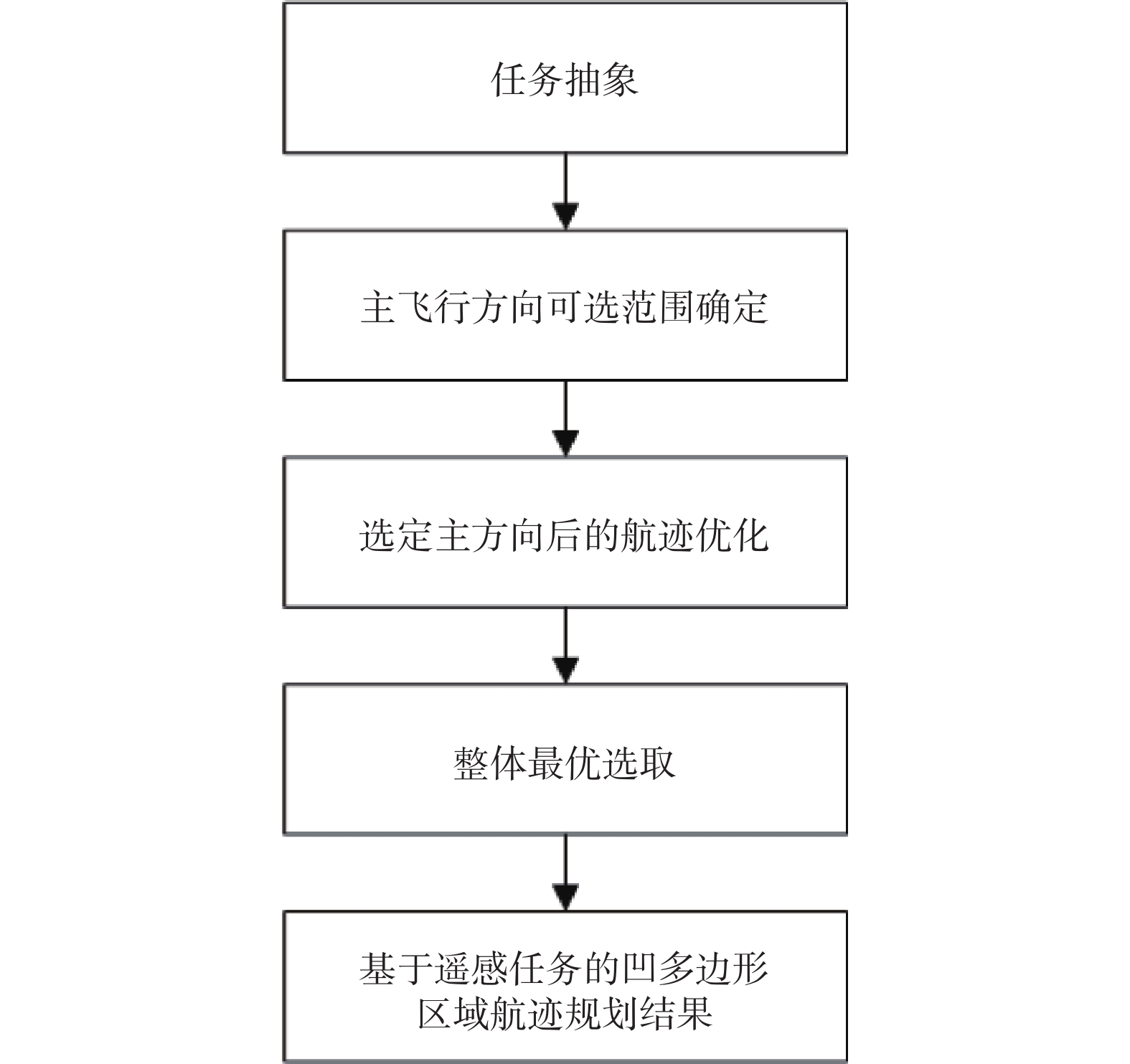
摘要: 针对遥感观测的需求与特点,提出一种基于遥感任务的凹多边形区域无人机 (UAV) 航迹规划算法,旨在保证UAV不相撞与区域全覆盖的前提下,总耗时更短. 根据遥感影像获取的特点,采用统一主飞行方向,定点拍摄进行UAV航迹规划. 通过航线分割点求取、多边形划分、UAV分配、碎片多边形合并与UAV再分配以及航点信息求取五个步骤,得到在选定主飞行方向的情况下UAV航迹的优化. 通过选取凹多边形及其凸包的边所在的方向分别为主方向,得到全局最优解. 实验结果表明:该算法能合理分配UAV并进行航迹规划,比传统方法更为高效、适用性更强.Abstract: For the needs and characteristics of remote sensing observing. We proposes an unmanned aerial vehicle (UAV) track planning algorithm based on remote sensing tasks in concave polygonal areas. The algorithm aims to ensure UAV’s non-collision and full area coverage with shorter total time consumption. According to remote sensing image acquisition characteristics, the UAV track planning is carried out by unified main flight direction and fixed-point shooting. The UAV track optimization under the selected main flight direction is obtained through five steps: route segmentation point calculation, polygon division, UAVs assignment, fragment polygon merging and UAVs reassignment, and waypoint information calculation. The global optimal solution is obtained by selecting the main direction of the edges of the concave polygon and its convex hull, respectively. The experimental results show that the algorithm can reasonably assign UAVs and carry out track planning, which is more efficient and more applicable than traditional methods.
-
表 1 不同航迹规划算法的UAV耗时与总路程
算法 耗时/s 总路程/km 基于凸包的UAV航迹规划算法 1 616 68.7 基于凹多边形分割的UAV航迹规划算法 2000 59.0 基于遥感任务的UAV航迹规划算法 1 552 58.4  下载: 导出CSV
下载: 导出CSV
表 3 各个方向航迹规划UAV耗时与总路程
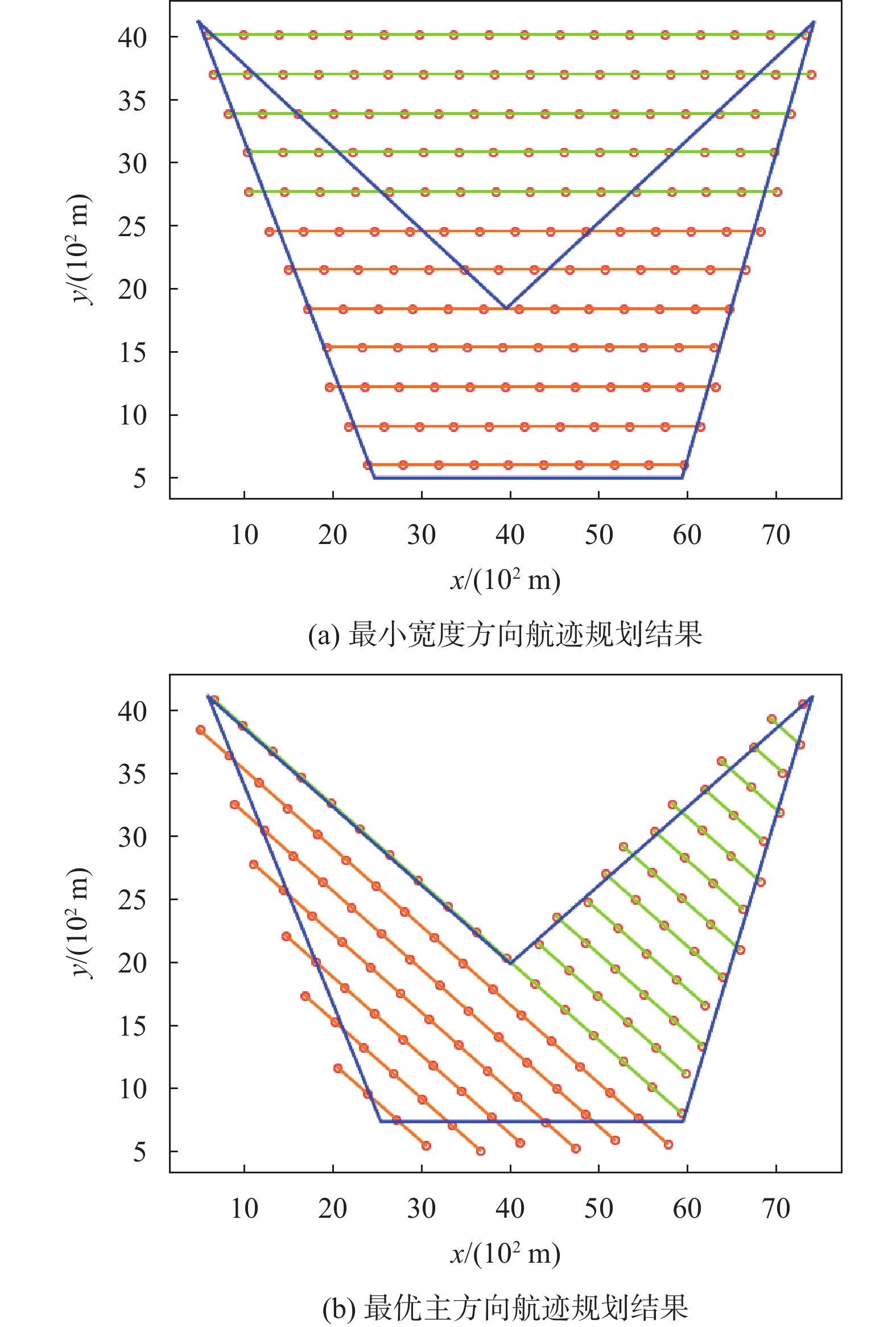
方向/(°) 任务一 任务二 耗时/s 总路程/km 耗时/s 总路程/km 最优方向 1 556 58.4 2 080 51.3 0 1 556 58.4 2 800 69.0 20 1 792 62.2 2 592 61.3 40 1 598 59.6 2 384 53.3 60 1 584 58.8 2 332 55.4 80 1 664 60.8 2 304 53.6 100 1 634 60.4 2 348 52.8 120 1 720 61.3 2 146 51.4 140 1 742 61.8 2 218 51.7 160 1 858 64.7 2 512 62.4
下载: 导出CSV
-
[1] 陈海, 王新民, 焦裕松, 等. 一种凸多边形区域的无人机覆盖航迹规划算法[J]. 航空学报, 2010, 31(9): 1802-1808. [2] COOMBES M, FLETCHER T, CHEN W H, et al. Optimal polygon decomposition for UAV survey coverage path planning in wind[J]. Sensors, 2018, 18(7): 2132. DOI: 10.3390/s18072132 [3] 王自亮, 罗德林, 吴顺祥. 凹多边形区域覆盖无人机航迹规划方法[J]. 航空兵器, 2020, 26(1): 95-100. [4] 彭辉, 沈林成, 霍霄华. 多UAV协同区域覆盖搜索研究[J]. 系统仿真学报, 2007, 19(11): 2472-2476. DOI: 10.3969/j.issn.1004-731X.2007.11.022 [5] 陈海, 何开锋, 钱炜祺. 多无人机协同覆盖路径规划[J]. 航空学报, 2016, 37(3): 928-935. [6] ARAÚJO J F, SUJIT P B, SOUSA J B. Multiple UAV area decomposition and coverage[C]// IEEE Symposium on Computational Intelligence for Security and Defense Applications, 2013. DOI: 10.1109/CISDA.2013.6595424 [7] GUASTELLA D C, CANTELLI L, GIAMMELLO G, et al. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments[J]. Computers and electrical engineering, 2019(75): 189-201. DOI: 10.1016/j.compeleceng.2019.02.024 [8] 廖文旭. 复杂环境下无人机航迹规划算法的研究[D]. 成都: 电子科技大学, 2021. [9] 史博辉. 面向森林火情的无人机航迹规划算法研究[D]. 西安: 西安理工大学, 2021. [10] 段慧瑶. 多无人机协同任务规划的研究与实现[D]. 长春: 吉林大学, 2020. [11] 徐文辉. 基于改进蚁群算法的无人机航迹规划研究[D]. 德阳: 中国民用航空飞行学院, 2020. [12] 刘紫玉, 赵丽霞, 薛建越, 等. 面向车辆路径问题的改进蚁群算法研究[J]. 河北科技大学学报, 2022, 43(1): 80-89. DOI: 10.7535/hbkd.2022yx01009 [13] 马培博, 钟麟. 基于蚁群算法的无人机侦察任务分配[J]. 无线电通信技术, 2022, 48(2): 371-375. DOI: 10.3969/j.issn.1003-3114.2022.02.024 [14] 毕天枢. 多无人机协同任务分配和航迹规划算法研究[D]. 北京: 北京邮电大学, 2020. [15] 韩晓微, 韩震, 岳高峰, 等. 救灾无人机的优化A*航迹规划算法[J]. 计算机工程与应用, 2021, 57(6): 232-238. DOI: 10.3778/j.issn.1002-8331.1912-0304 -



 点击查看大图
点击查看大图
图(9) / 表(3)
计量
- 文章访问数: 347
- HTML全文浏览量: 273
- PDF下载量: 41
- 被引次数: 0
