

Application of Helmert variance component estimation in GPS/GLONASS/BDS/Galileo combined precise point positioning weight determination
-
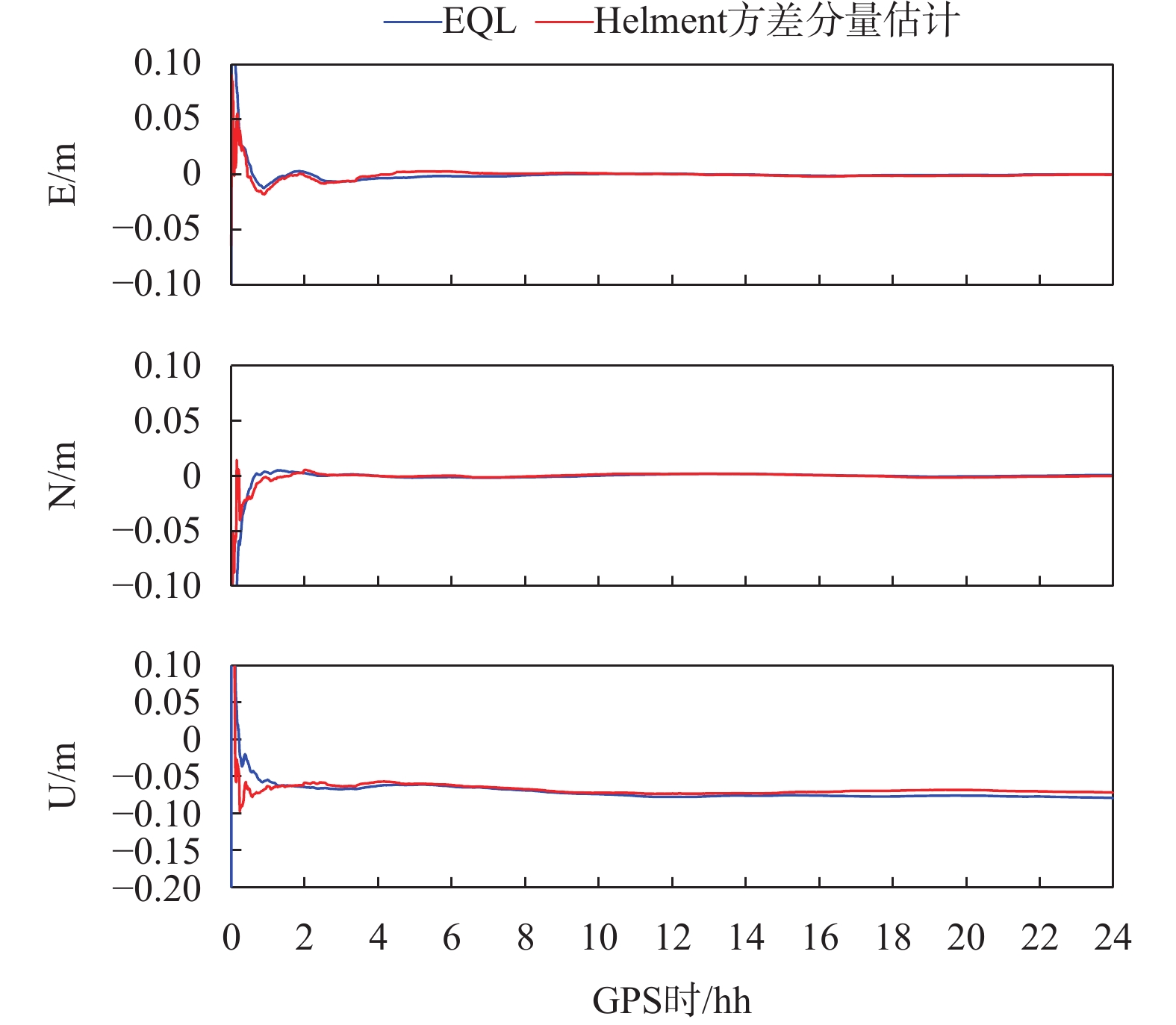
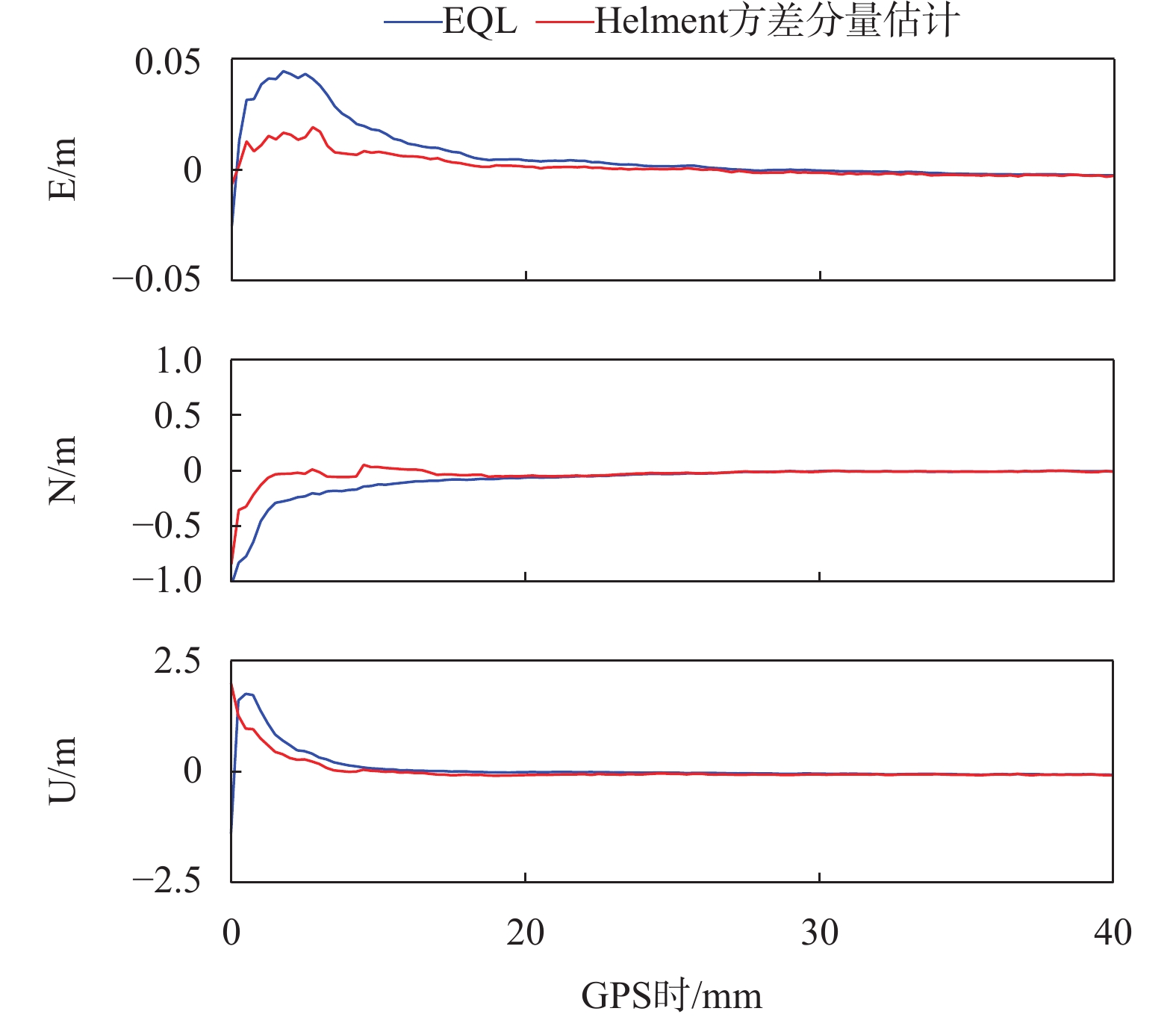
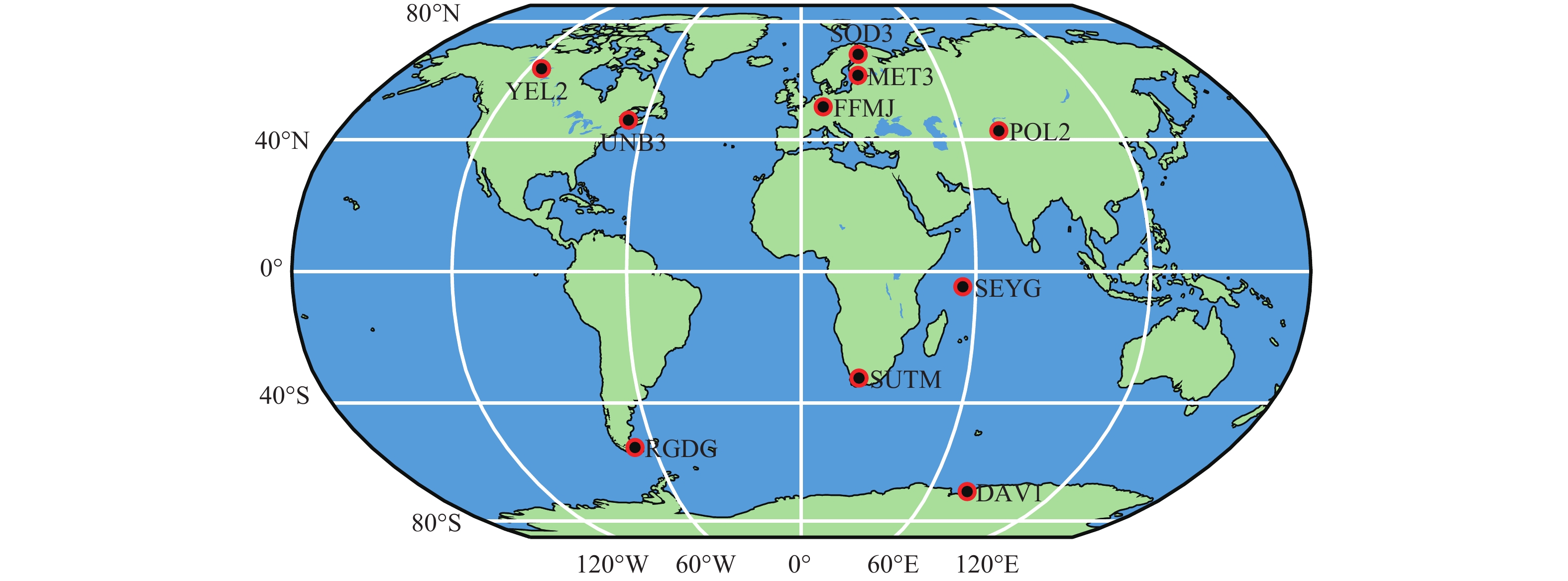
摘要: 多星座组合定位可以提升导航定位性能,但不同星座观测量组合时需要考虑合适的随机模型. 传统方法是根据经验直接设定各系统的等价权重,但会导致随机模型确定不精确,从而影响组合系统的性能提升. 将Helmert方差分量估计方法应用于GPS/GLONASS/BDS/Galileo组合精密单点定位(PPP)中,以自适应确定各系统间权比. 采用国际GNSS服务(IGS) MGEX (Multi-GNSS Experiment)观测网的10个测站一周的观测数据进行静态和仿动态试验. 结果表明:采用Helmert方差分量估计定权方法可显著提高GPS/GLONASS/BDS/Galileo组合 PPP的收敛速度,与等权定权方案比较,静态模式下平均提高52%,仿动态模式下平均提高64%. 因定位精度主要由载波相位观测值精度和误差修正水平决定,在静态和仿动态测试中Helmert方差分量估计方法对定位精度没有明显改善.
-
关键词:
- 精密单点定位(PPP) /
- Helmert方差分量估计 /
- 定权 /
- 精度 /
- 收敛速度
Abstract: Multi-constellation combined positioning can improve the performance of navigation and positioning, but a suitable stochastic model needs to be considered when combining observations from different constellations. The traditional method is to directly set the equivalent weight of each system based on experience, which will lead to inaccurate determination of the stochastic model, and thus affect the performance improvement of the combined system. In this paper, Helmert variance component estimation method is applied to GPS/GLONASS/BDS/Galileo combined precise point positioning to adaptively determine the weight ratio between systems. The static and pseudo-dynamic tests were carried out using the daily observation dataset collected at 10 stations in the global International GNSS Service (IGS) Multi-GNSS experiment (MGEX) observation network over one week of February 8 to February 14, 2021. The results show that the Helmert variance component estimation weighting method can significantly improve the convergence speed of GPS/GLONASS/BDS/Galileo combined precise point positioning (PPP), with an average increase of 52% in static mode and 64% in pseudo-dynamic mode. Because the positioning accuracy is mainly determined by the carrier phase observation accuracy and error correction level, the Helmert variance component estimation method has no obvious improvement on positioning accuracy in static and pseudo-dynamic tests. -
表 1 多星座组合精密单点定位数据处理策略
项目 处理策略 卫星系统及信号 GPS:L1/L2 GLONASS:G1/G2
BDS:B1/B2b Galileo:El/E5a观测值组合类型 无电离层组合 截至高度角/° 7 采样间隔/s 30 卫星轨道、钟差 GFZ 精密产品 对流层干分量 Saastmoinen模型+GMF投影函数 接收机/卫星天线相位中心
偏差及其变化IGS绝对天线模型(igs14.atx) 其余误差 模型改正 接收机坐标 常数(静态),白噪声(动态) 对流层天顶湿分量 随机游走 接收机钟差 白噪声 模糊度 常数、浮点解  下载: 导出CSV
下载: 导出CSV
表 2 静态模式下所有站点两种定权方案的定位误差和收敛时间对比
测站 定权方案 E/m N/m U/m 3D/m 收敛时间/min SOD3 等权 0.002 0.002 0.014 0.015 27.786 Helmert方差分量估计 0.001 0.002 0.016 0.016 11.929 FFMJ 等权 0.003 0.003 0.060 0.061 32.857 Helmert方差分量估计 0.002 0.002 0.048 0.048 7.429 MET3 等权 0.002 0.003 0.020 0.021 34.286 Helmert方差分量估计 0.003 0.003 0.025 0.025 13.071 RGDG 等权 0.004 0.002 0.025 0.026 10.929 Helmert方差分量估计 0.004 0.003 0.032 0.032 10.071 DAV1 等权 0.001 0.002 0.076 0.076 10.357 Helmert方差分量估计 0.001 0.001 0.073 0.073 7.143 UNB3 等权 0.003 0.001 0.007 0.009 16.857 Helmert方差分量估计 0.004 0.002 0.004 0.007 19.071 POL2 等权 0.003 0.001 0.017 0.017 29.286 Helmert方差分量估计 0.002 0.001 0.025 0.025 8.286 YEL2 等权 0.009 0.007 0.037 0.040 14.000 Helmert方差分量估计 0.004 0.005 0.031 0.032 5.429 SUTM 等权 0.005 0.004 0.006 0.009 36.500 Helmert方差分量估计 0.005 0.005 0.010 0.014 18.000 SEYG 等权 0.005 0.005 0.014 0.016 19.071 Helmert方差分量估计 0.002 0.004 0.018 0.019 10.714
下载: 导出CSV
表 3 静态仿动态模式下所有站点两种定权方案的定位误差和收敛时间对比
测站 定权方案 E/m N/m U/m 3D/m 收敛时间/min SOD3 等权 0.024 0.031 0.054 0.069 28.643 Helmert方差分量估计 0.021 0.018 0.047 0.055 8.214 FFMJ 等权 0.026 0.018 0.072 0.079 36.143 Helmert方差分量估计 0.020 0.016 0.061 0.066 4.357 MET3 等权 0.027 0.018 0.036 0.049 31.643 Helmert方差分量估计 0.023 0.020 0.038 0.049 10.071 RGDG 等权 0.018 0.018 0.052 0.058 9.571 Helmert方差分量估计 0.021 0.020 0.054 0.061 5.929 DAV1 等权 0.028 0.016 0.087 0.095 12.571 Helmert方差分量估计 0.022 0.018 0.084 0.091 6.571 UNB3 等权 0.019 0.014 0.028 0.037 14.714 Helmert方差分量估计 0.019 0.017 0.034 0.042 8.000 POL2 等权 0.025 0.020 0.048 0.058 29.571 Helmert方差分量估计 0.015 0.020 0.060 0.065 11.143 YEL2 等权 0.063 0.040 0.112 0.136 13.214 Helmert方差分量估计 0.039 0.032 0.078 0.093 3.286 SUTM 等权 0.037 0.030 0.075 0.090 30.071 Helmert方差分量估计 0.031 0.025 0.074 0.085 16.571 SEYG 等权 0.034 0.015 0.045 0.059 13.929 Helmert方差分量估计 0.021 0.014 0.043 0.050 6.143
下载: 导出CSV
-
[1] HEGARTY C J, CHATRE E. Evolution of the Global Navigation Satellite System (GNSS)[J]. Proceedings of the IEEE, 2008, 96(12): 1902-1917. DOI: 10.1109/JPROC.2008.2006090 [2] 代阳, 刘超. Helmert方差分量估计在GPS/GLONASS/BDS/Galileo组合定位权比确定中的应用[J]. 山东科技大学学报(自然科学版), 2020, 39(6): 34-41. [3] 龙新. 多系统融合精密单点定位模糊度算法研究[D]. 贵阳: 贵州大学, 2018. [4] 程俊兵. 复杂环境中BDS快速精密定位方法研究[J]. 测绘学报, 2021, 50(4): 564. [5] WANG M, CHAI H Z, LI Y. Performance analysis of BDS/GPS precise point positioning with undifferenced ambiguity resolution[J]. Advances in space research, 2017, 60(12): 2581-2595. DOI: 10.1016/j.asr.2017.01.045 [6] ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of geophysical research, 1997, 102(B3): 5005-5017. DOI: 10.1029/96JB03860 [7] GAO Z Z, SHEN W B, ZHANG H P, et al. Application of Helmert variance component based adaptive Kalman filter in multi-GNSS PPP/INS tightly coupled integration[J]. Remote sensing, 2016, 8(7): 553-571. DOI: 10.3390/rs8070553 [8] SEARLE S R. An overview of variance component estimation[J]. Metrika, 1995(42): 215-230. DOI: 10.1007/BF01894301 [9] 孙楠, 杨玲, 喻杨康. ARAIM随机模型精化对完好性监测可用性的影响分析[C]//第十三届中国卫星导航年会论文集. 2022: 67-72. [10] CAI C S, PAN L, GAO Y. A precise weighting approach with application to combined L1/B1 GPS/BeiDou positioning[J]. The journal of navigation, 2014, 67(5): 911-925. DOI: 10.1017/S0373463314000320 [11] RAO C R. Estimation of variance and covariance components MINQUE theory[J]. Journal of multivariate analysis, 1971, 1(3): 257-275. DOI: 10.1016/0047-259x(71)90001-7 [12] KOCH K R. Parameter estimation and hypothesis testing in linear models[M]. Springer Science and Business Media, 1999. DOI: 10.1007/978-3-662-03976-2 [13] TEUNISSEN P J G, AMIRI-SIMKOOEI A R. Least-squares variance component estimation[J]. Journal of geodesy, 2008, 82(2): 65-82. DOI: 10.1007/s00190-007-0157-x [14] YU Z C. A universal formula of maximum likelihood estimation of variance-covariance components[J]. Journal of geodesy, 1996, 70(4): 233-240. DOI: 10.1007/BF00873704 [15] ZHANG Q Q, ZHAO L, ZHOU J H. A novel weighting approach for variance component estimation in GPS/BDS PPP[J]. IEEE sensors journal, 2019, 19(10): 3763-3771. DOI: 10.1109/JSEN.2019.2895041 [16] 张哲浩, 潘林. 多系统融合单点定位先验和验后定权研究[J]. 全球定位系统, 2021, 46(3): 1-6. DOI: 10.12265/j.gnss.2021010401 [17] 王何鹏. GPS/BDS组合动态精密单点定位研究[D]. 南昌: 南昌大学, 2021. [18] BAHADUR B, NOHUTCU M. Integration of variance component estimation with robust Kalman filter for single-frequency multi-GNSS positioning[J]. Measurement, 2020, 173(9): 108596. DOI: 10.1016/j.measurement.2020.108596 [19] CAI C S, GAO Y. Modeling and assessment of combined GPS/GLONASS precise point positioning[J]. GPS solutions, 2013, 17(2): 223-236. DOI: 10.1007/s10291-012-0273-9 [20] 任锴, 杨力, 冯勇, 等. 序贯静态点定位的原理与实现[J]. 测绘信息与工程, 2008, 33(6): 10-12. [21] 崔希璋. 广义测量平差[M]. 武汉: 武汉大学出版社, 2009. -





 点击查看大图
点击查看大图
图(7) / 表(3)
计量
- 文章访问数: 389
- HTML全文浏览量: 82
- PDF下载量: 55
- 被引次数: 0
