

Research on automatic test and evaluation method of GNSS/INS Integrated Navigation Attitude performance based on high-precision three-axis turntable
-
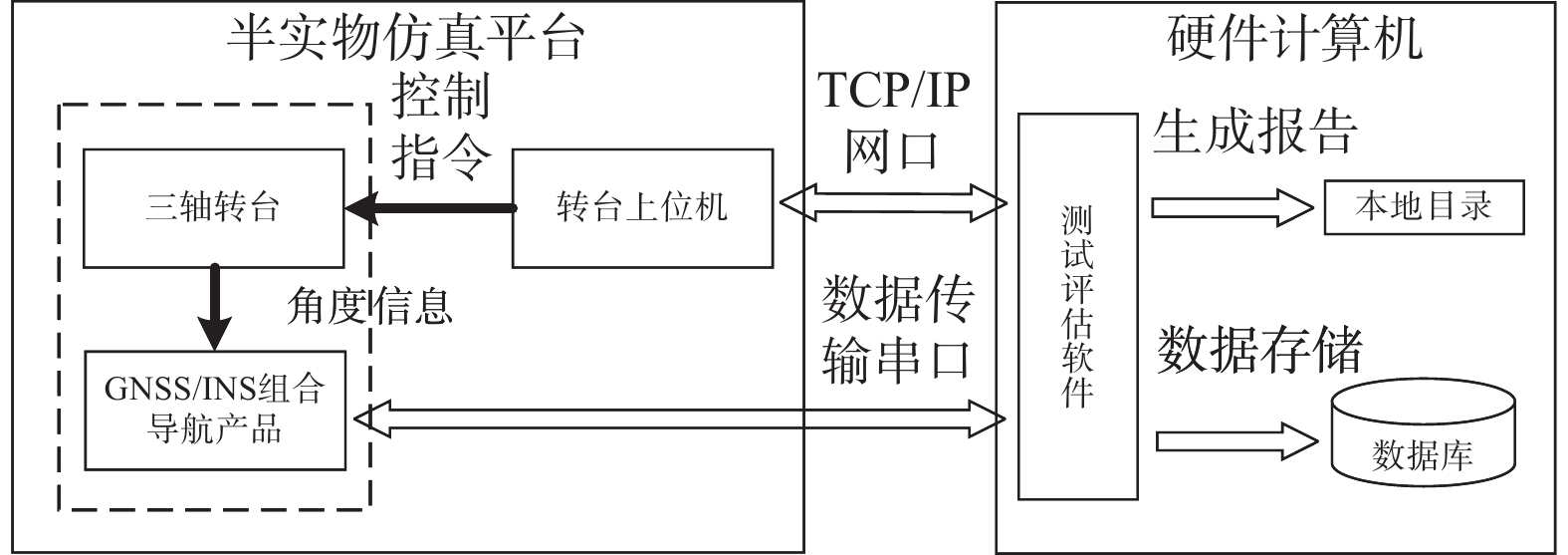
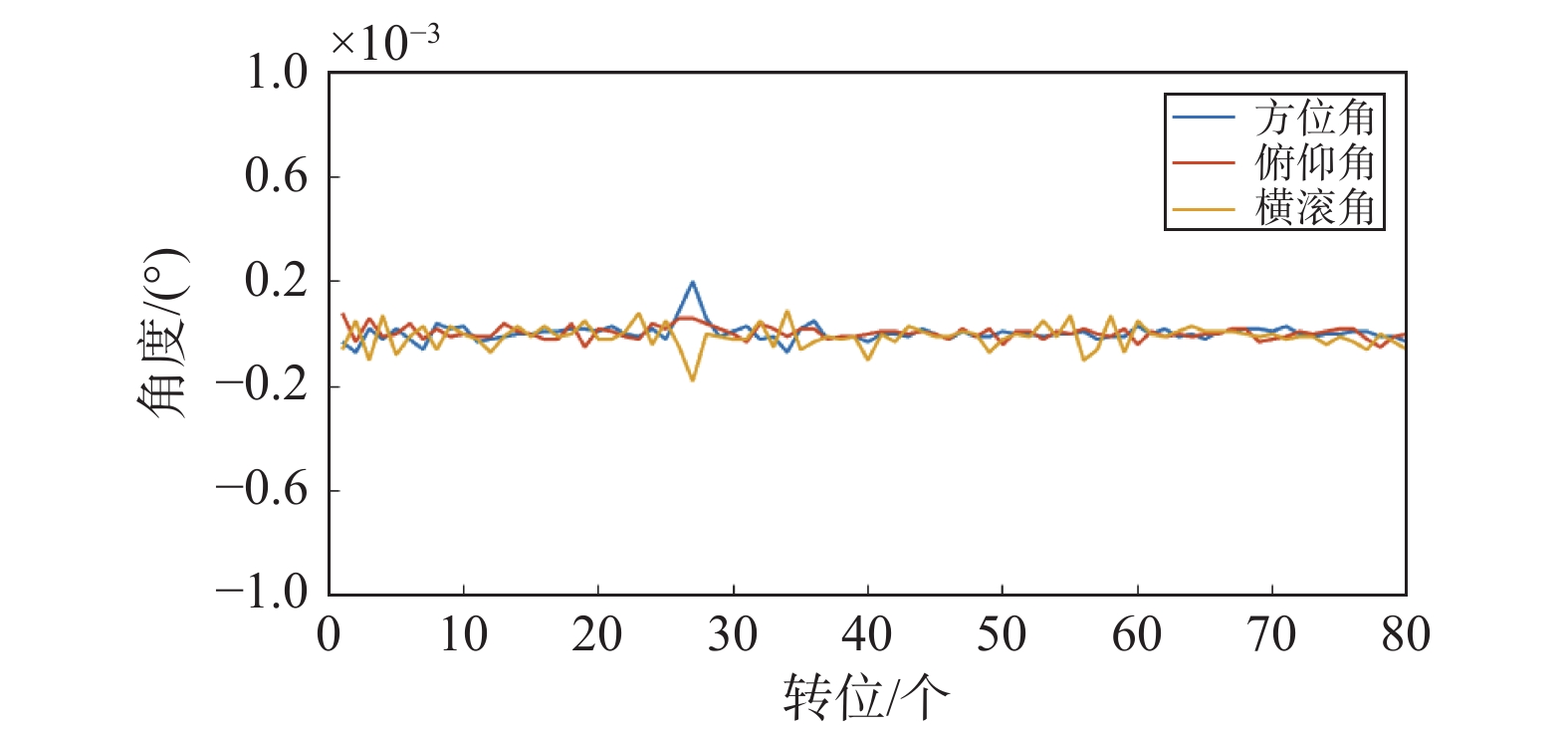
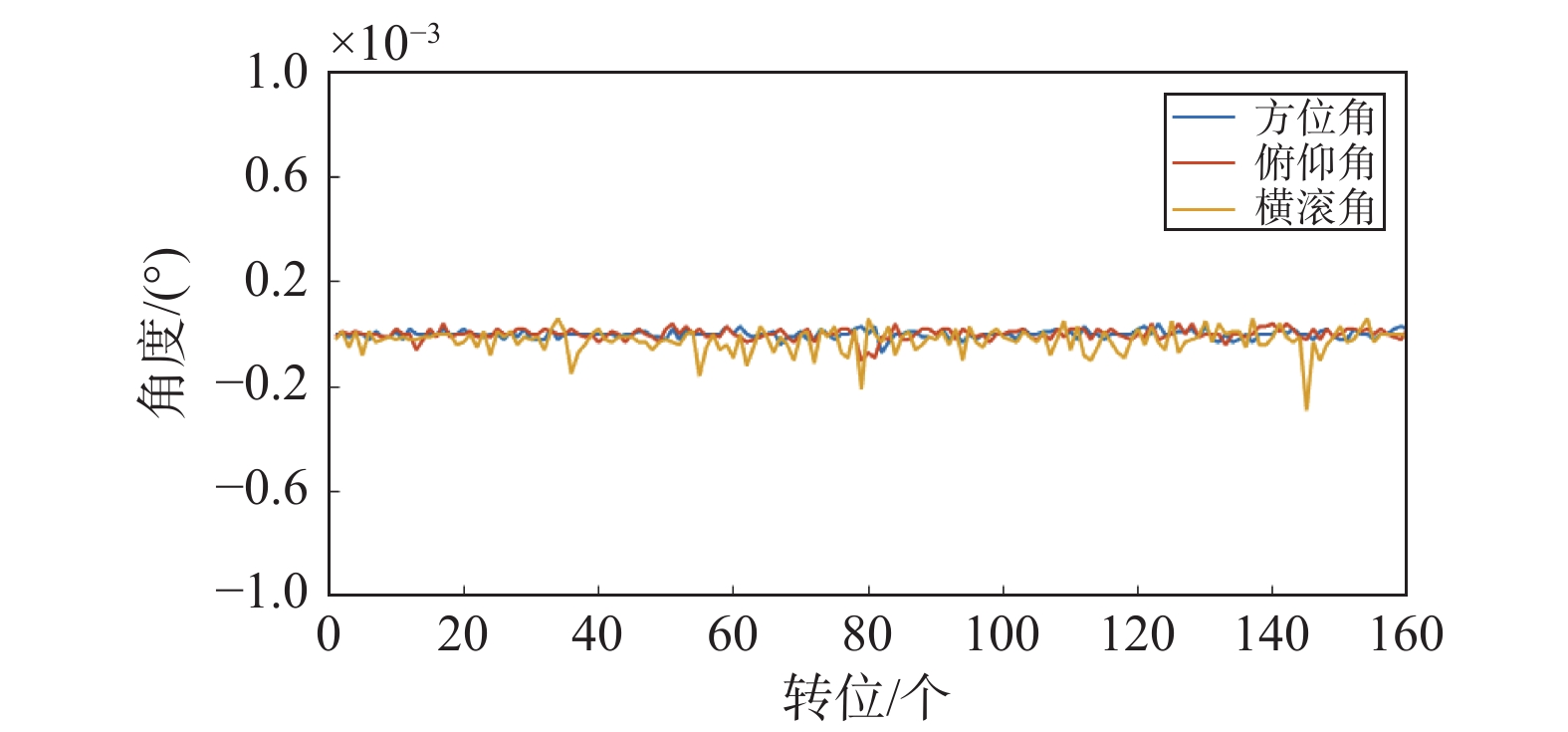
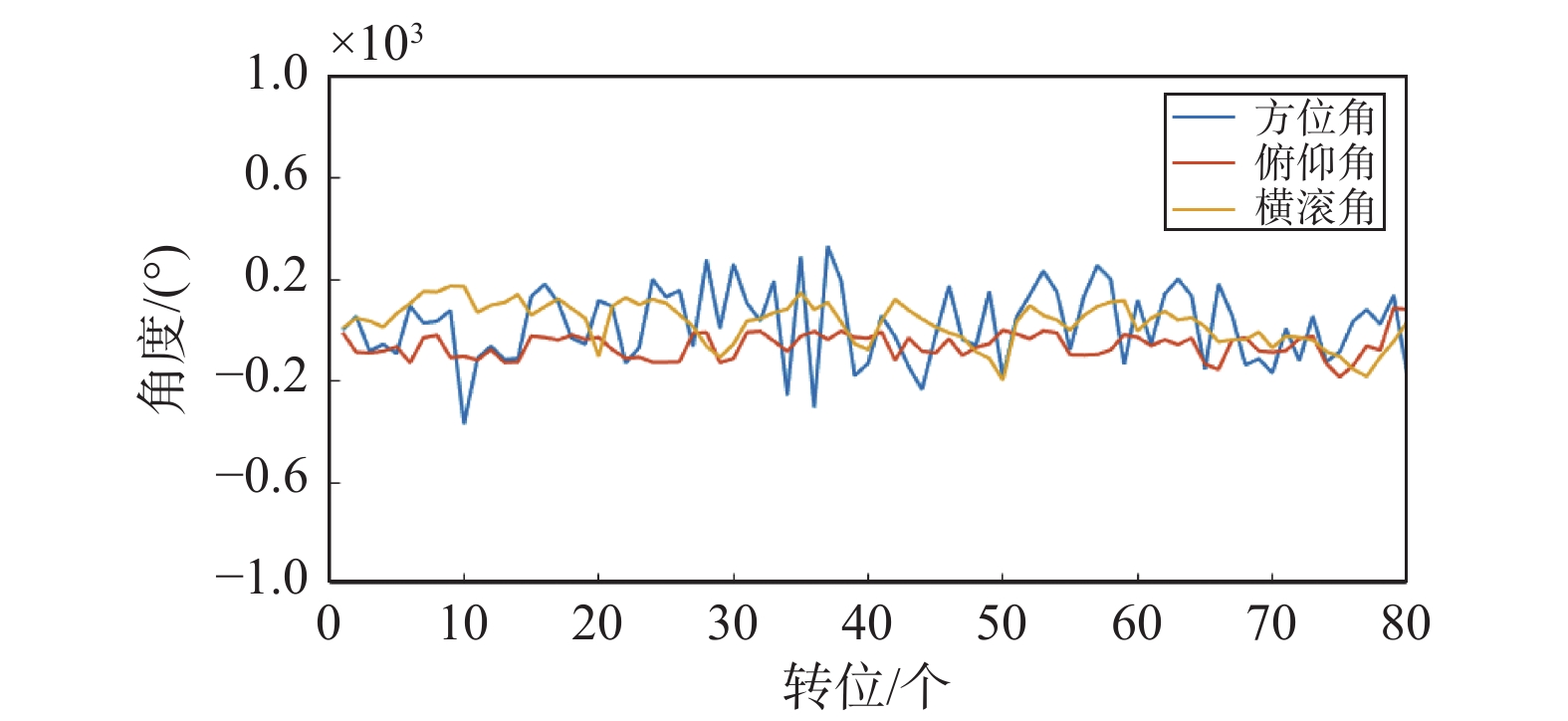
摘要: 目前全球卫星导航系统/惯性导航系统(GNSS/INS)组合系统性能测试评估技术存在评价方式单一,数据自动化处理程度不高等问题. 针对系统的姿态性能,研究了GNSS/INS组合导航姿态性能动态测试评估新方法,并研发了相应的自动化控制测试评估软件. 该方法基于高精度三轴动态基准仿真转台进行,首先通过多转位、多姿态运动场景的任务进行测试,采集转台三轴运动姿态数据与组合导航系统输出数据,然后利用Thompson奇异值剔除法对实测数据进行处理,最后结合转台实测数据进行不确定度分析从而完成测试评估工作. 针对微机电系统(MEMS)组合导航产品开展了两组测试,实测结果表明:该方法可以较好地抑制组合导航系统中出现的奇异值点,同时转台的不确定度值均在0.2″以内,验证了该测试评估方法的高可行性与可靠性.
-
关键词:
- 全球卫星导航系统/惯性导航系统(GNSS/INS) /
- 测试评估 /
- 误差分析 /
- 不确定度分析 /
- 可视化
Abstract: At present, for the Global Navigation Satellite System /Inertial Navigation System (GNSS/INS) performance test and evaluation the evaluation method is single and automatic data processing is still at a low level. Aiming at the attitude performance evaluation of the system, this paper studies a new dynamic test and evaluation method of GNSS/INS performance, and develops corresponding automatic control test and evaluation software. Based on the high-precision three-axis dynamic benchmark simulation turntable, this method first tests through the task of multi rotation and multi attitude motion scene, collects the three-axis motion attitude data of turntable and the output data of integrated navigation system, then processes the measured data by Thompson singular value elimination method, and finally analyzes the uncertainty combined with the measured data of turntable so as to complete the test and evaluation work. In this paper two groups of tests are carried out on a Micro Electro Mechanical System (MEMS) integrated navigation product. Results show that this method can better suppress the singular value points in the integrated navigation system, and the uncertainty values of the turntable are within 0.2", which verifies the high feasibility and reliability of the test and evaluation method. -
表 3 Newton-M3测试评估结果
评估任务 第一组 第二组 RMS提升
/%方位角RMS
误差/(°)俯仰角RMS
误差/(°)横滚角RMS
误差/(°)方位角RMS
误差/(°)俯仰角RMS
误差/(°)横滚角RMS
误差/(°)任务1 0.415 0.400 0.401 0.125 0.063 0.065 69.87 84.25 83.79 任务2 0.578 0.564 0.566 0.149 0.078 0.088 74.22 86.17 84.45  下载: 导出CSV
下载: 导出CSV
-
[1] 张国良, 曾静. 组合导航原理与技术[M]. 西安: 西安交通大学出版社, 2008. [2] 柴大帅. 高频单历元GNSS动态差分定位技术研究[D]. 青岛: 山东科技大学, 2017. [3] 雷浩然. 弹载 SINS/GNSS 组合导航系统研究[D]. 南京: 南京理工大学, 2014. [4] 张羽成. 基于GNSS/IMU的无人机高精度定位导航性能分析及应用研究[D]. 南京: 南京航空航天大学, 2018. [5] TITTERTON D H, WESTON J L. Strapdown inertial navigation technology[J]. Aerospace and electronic systems magazine IEEE, 2004. DOI: 10.1049/PBRA017E [6] YAO Y Q, XU X S, ZHU C C, et al. A hybrid fusion algorithm for GPS/INS integration during GPS outages[J]. Measurement, 2017(103): 42-51. DOI: 10.1016/j.measurement.2017.01.053 [7] 叶萍. MEMS IMU/GNSS超紧组合导航技术研究[D]. 上海: 上海交通大学, 2011. [8] 杨阳. 组合导航滤波算法设计及其性能评估方法研究[D]. 郑州: 河南工业大学, 2018. [9] 陈晶, 董铭涛, 程建华. 层次分析的惯导/重力匹配导航系统性能评估方法[J]. 传感器与微系统, 2016, 35(9): 23-26. [10] 张薇. 深空探测测速测角组合导航性能评估平台的设计与实现[D]. 成都: 电子科技大学, 2019. [11] 高琳, 班亚龙, 牛小骥. 基于信号嫁接技术的IMU导航性能评估方法[J]. 传感器与微系统, 2015, 34(4): 30-33. [12] 王敏. 组合导航系统性能评估与试验设计[D]. 哈尔滨: 哈尔滨工程大学, 2011. [13] 卢鸿谦. SINS/GPS组合导航性能增强技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2006. [14] 赵琳, 班镜超. 组合导航联邦滤波故障检测技术研究[J]. 遥测遥控, 2014, 35(2): 9-13. DOI: 10.3969/j.issn.2095-1000.2014.02.002 -





 点击查看大图
点击查看大图
图(12) / 表(3)
计量
- 文章访问数: 169
- HTML全文浏览量: 55
- PDF下载量: 16
- 被引次数: 0
